
Full Video is at the bottom
A force multiplier is any factor or condition that contributes to the overall stress of a rope system during a dynamic state. Rating this dynamic state or rope movement/stress is best represented as the Dynamic System Safety Factor (DSSF). In other words, what’s our weakest link during the operation of our rope system at its point of greatest stress, typically during the onset of a hauling process.
During the course of this unit, we’ll examine five areas of misunderstanding in rope rigging commonly seen with emergency responders in the urban technical rescue environment:
- Force Vectors
- Tensile Force
- Compression Force
- Friction
- And torque
The discussion will center around Unit-less Values, Scalars, and Vectors. These are essentially escalating terms and incorporate all the common aspects of we “think about” in terms of rigging a system. As you’ll see, there’s a lot going on!
So, I want to be really clear about the difference between unitless values, scalars and vectors.
 |
 |
 |
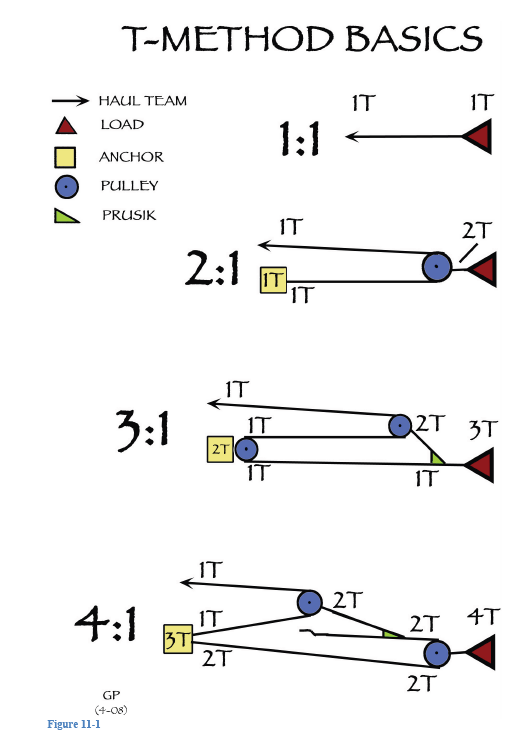
Now, most people are already familiar with broadly what we mean by a vector, because we’re talking about resultant forces. But I need to just divide those three up a little bit. So unitless values are typically things like ratios. An example of a ratio is the mechanical advantage that we look at with systems. I don’t normally say that the mechanical advantage of that system is three-to-one feet, or three-to-one hours. It’s just three to one, we don’t have any units that we tack on the end of that description. So that’s a unitless value.
 |
 |
Another example of such a ratio is the number Pi, or something like 3.14159. We never put units on the end of that because it technically is the ratio between the diameter and the circumference of a circle. And whatever we measure that diameter in, centimeters, then we would put the Pi in there and we get an answer that’s in centimeters. So we don’t put a unit with the number Pi, because it is a ratio.
The next thing, if we do start to associate values, if we’re talking about measuring the length of things, so I can say to someone, “How long is that pen?” And then I can get a ruler and put it there and measure it. And I might get that that’s 15 centimeters. That unit on the end is important, because if I just said 15 and then wrote that down, it’s a pen that’s 15 long. Someone else might read that and say, “Well, is that centimeters or is it inches? Or … ” And they have to guess. So we’ve got to be quite specific when we’re measuring things like that, which is why we put units like centimeters.
 |
 |
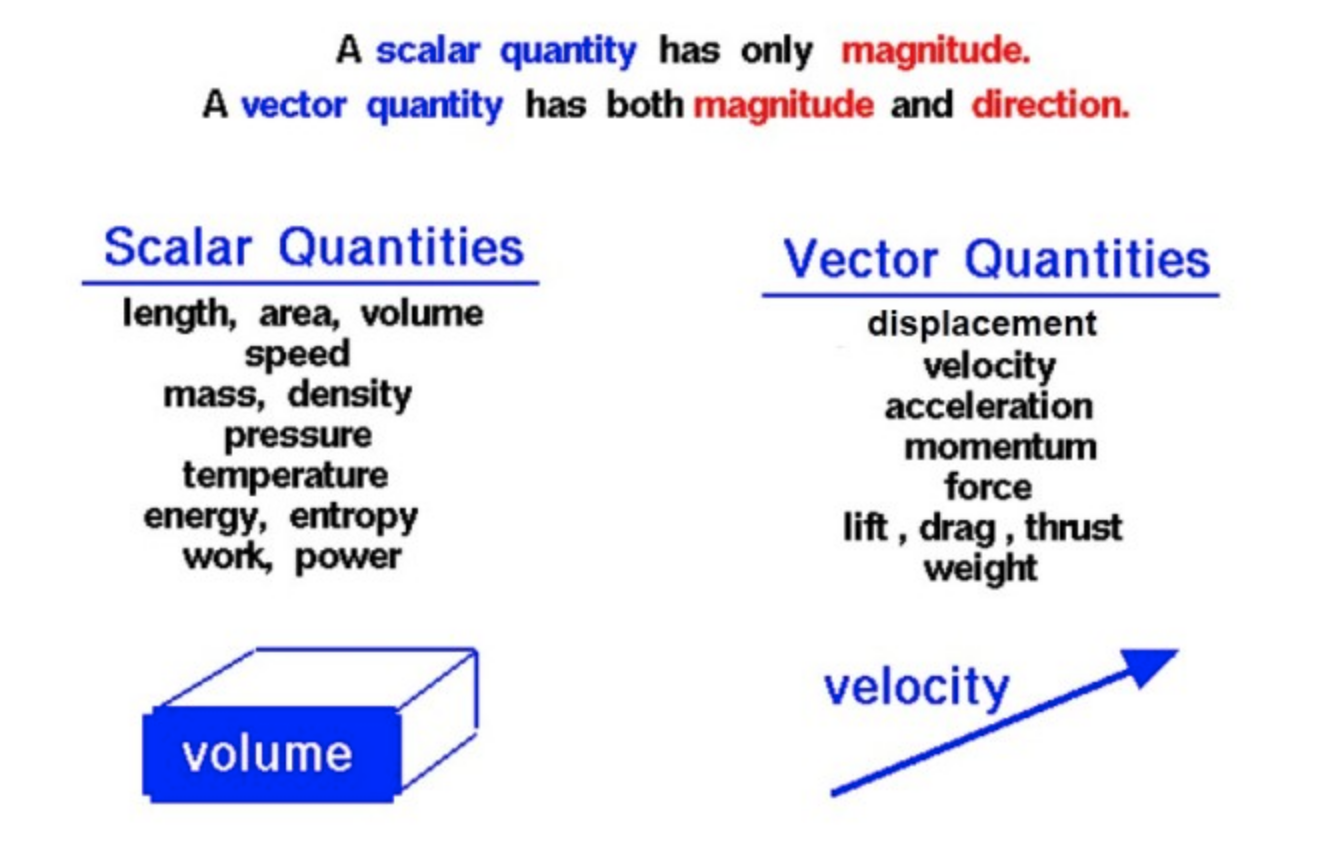
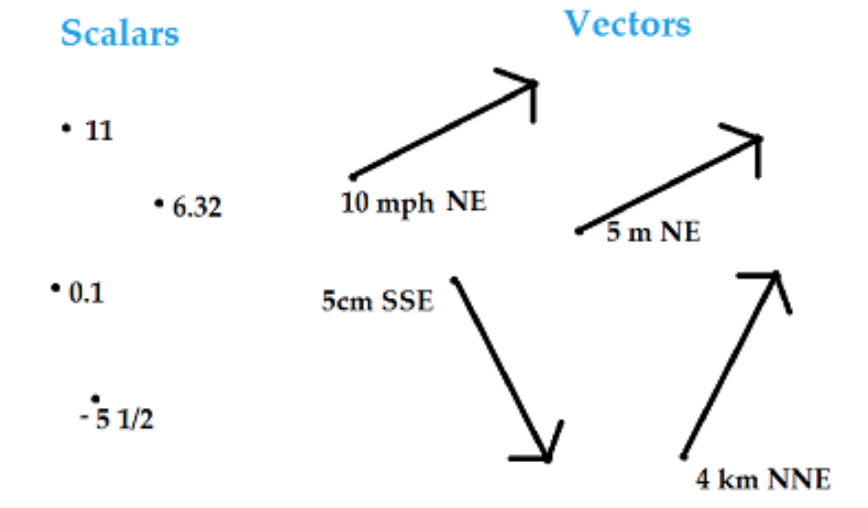
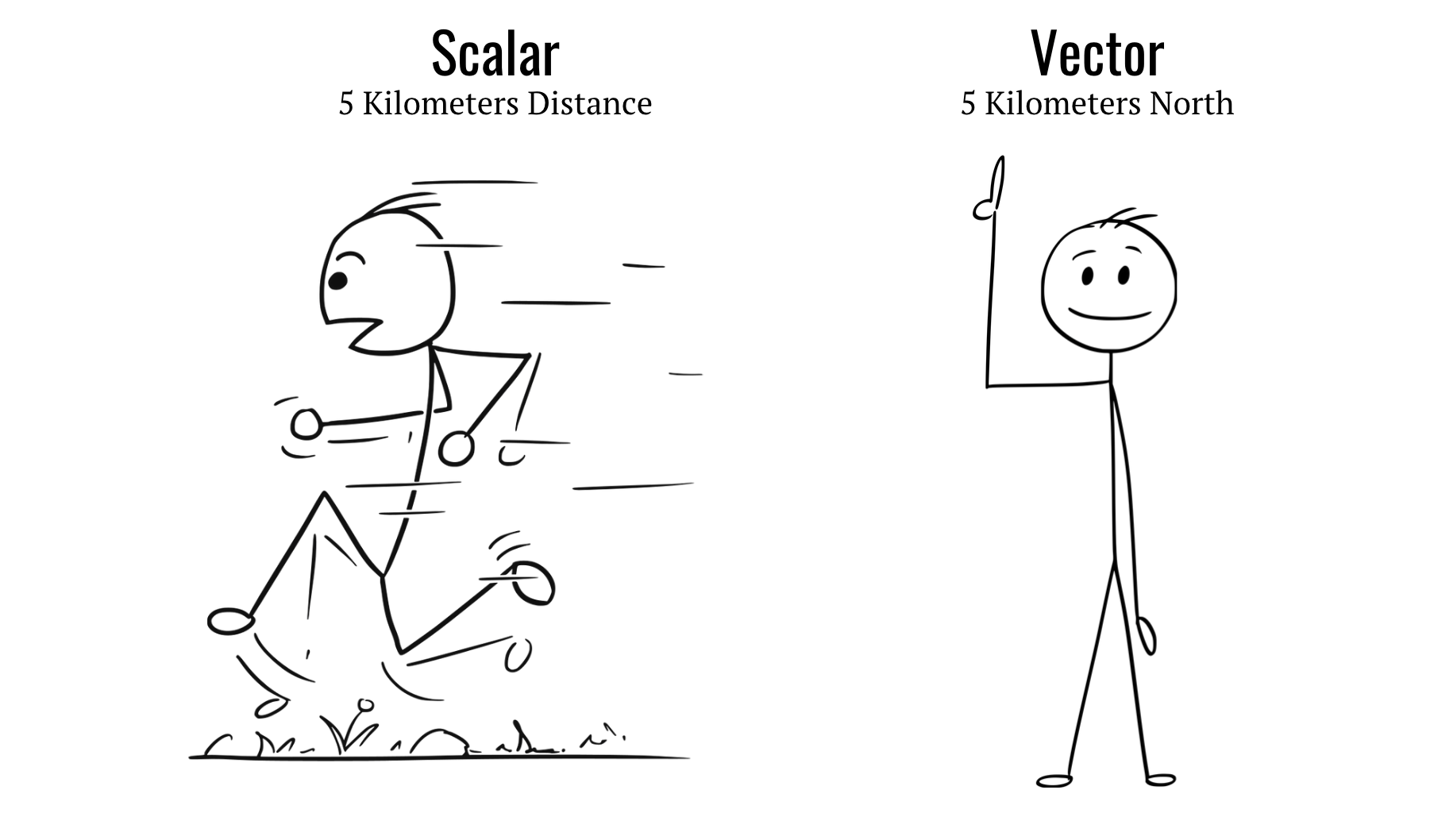
So a scalar only has a dimensional unit that we associate with it. Vectors, now, are the next step in that process. When we measure vectors, we don’t just need to measure how many or how far or how long. We also need to say what direction, where we’re going to be applying that effort or that distance.
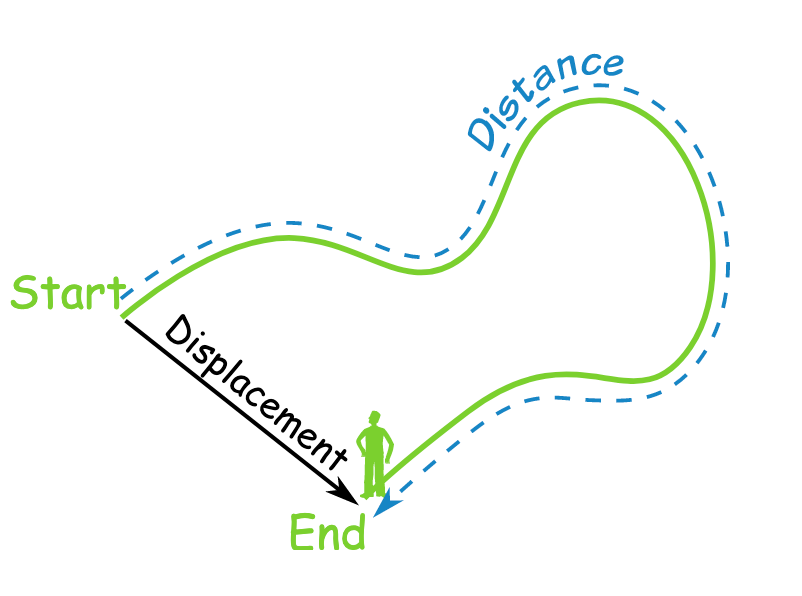
Now a good example, just to distinguish between a scalar value and a vector quantity is if we’re talking about traveling. So I can say that I’ve just traveled a distance of two miles. That would be a scalar measurement of distance. The vector equivalent of that, we would describe as displacement.
And if I want to talk about that as a displacement, I don’t just say I’ve traveled two miles, but I might say that I’ve traveled two miles heading due north. And that way, if I’ve got someone describing on a radio their journey, they might say they’ve gone two miles due north, and then they’ve gone one mile east. And that enables me to work out exactly where their position is because I can go up two miles and across one. And on the map, I can plot their position, which gives me a final vector displacement from here to this point.
So the vectors and that description of magnitude and direction are really important when we’re talking about analyzing the forces in the systems that we’re going to be working with.
 |
 |
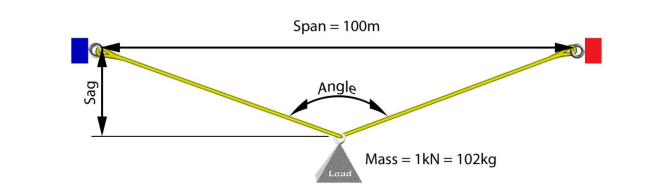
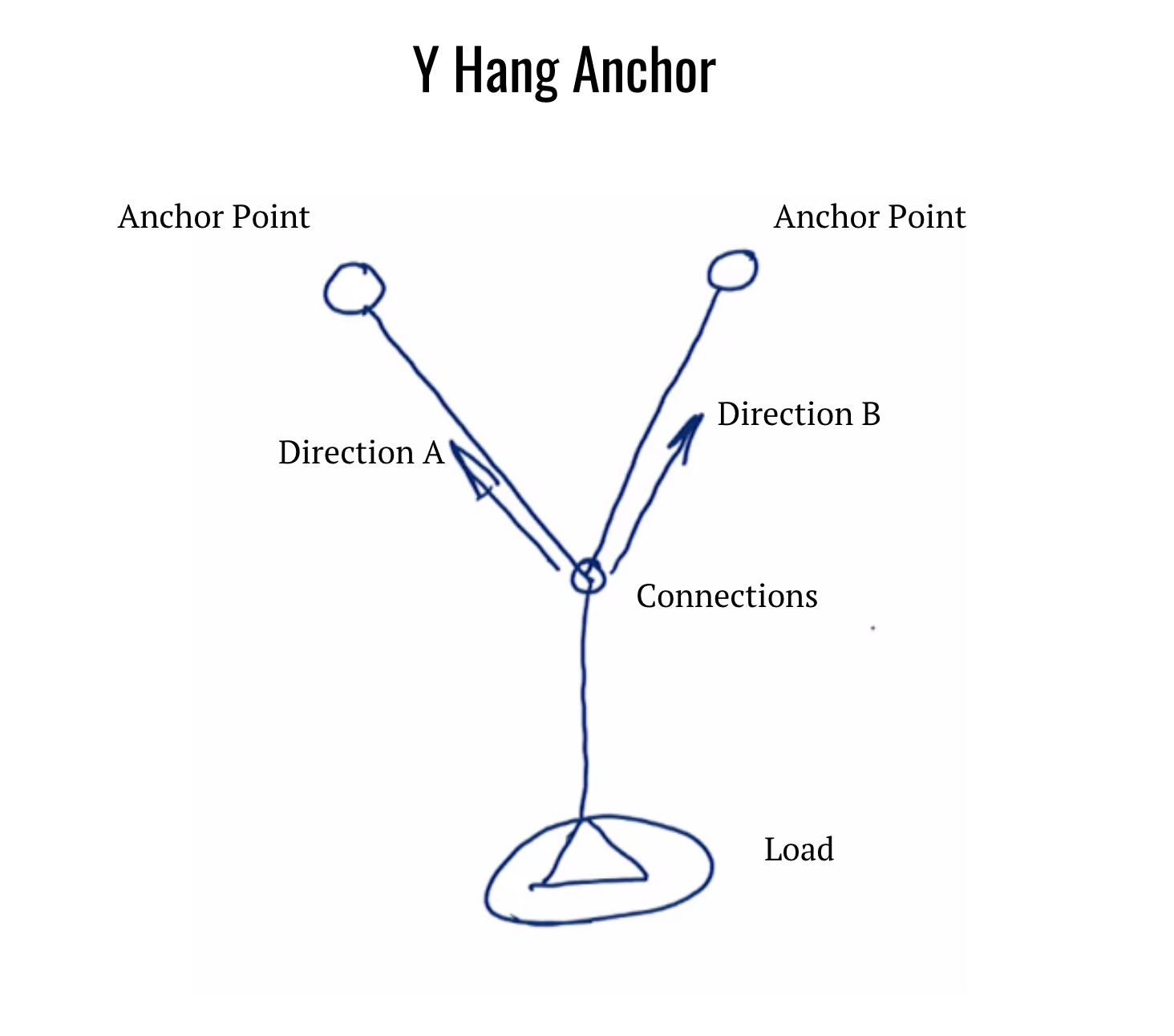
Let’s consider one such system. And it might be a typical … If it’s a rope access context, a Y hang anchor, where we would have, and I’ll just go to the tablet here. I might have one anchor point in this position here, and I might have another anchor point here. And then I’m going to set up my roping system so that it’s attached to both of these anchors. I’ll have some connector or some knot system here. And then I might have my load suspended below on that rope based system.
When we’re working out our resultant forces and the way we distribute the loads, or attribute the amount of tension in each of these anchor legs as a result of this load being applied to the system, we’ve got directions that are actually defined by each of these anchor legs in the system.
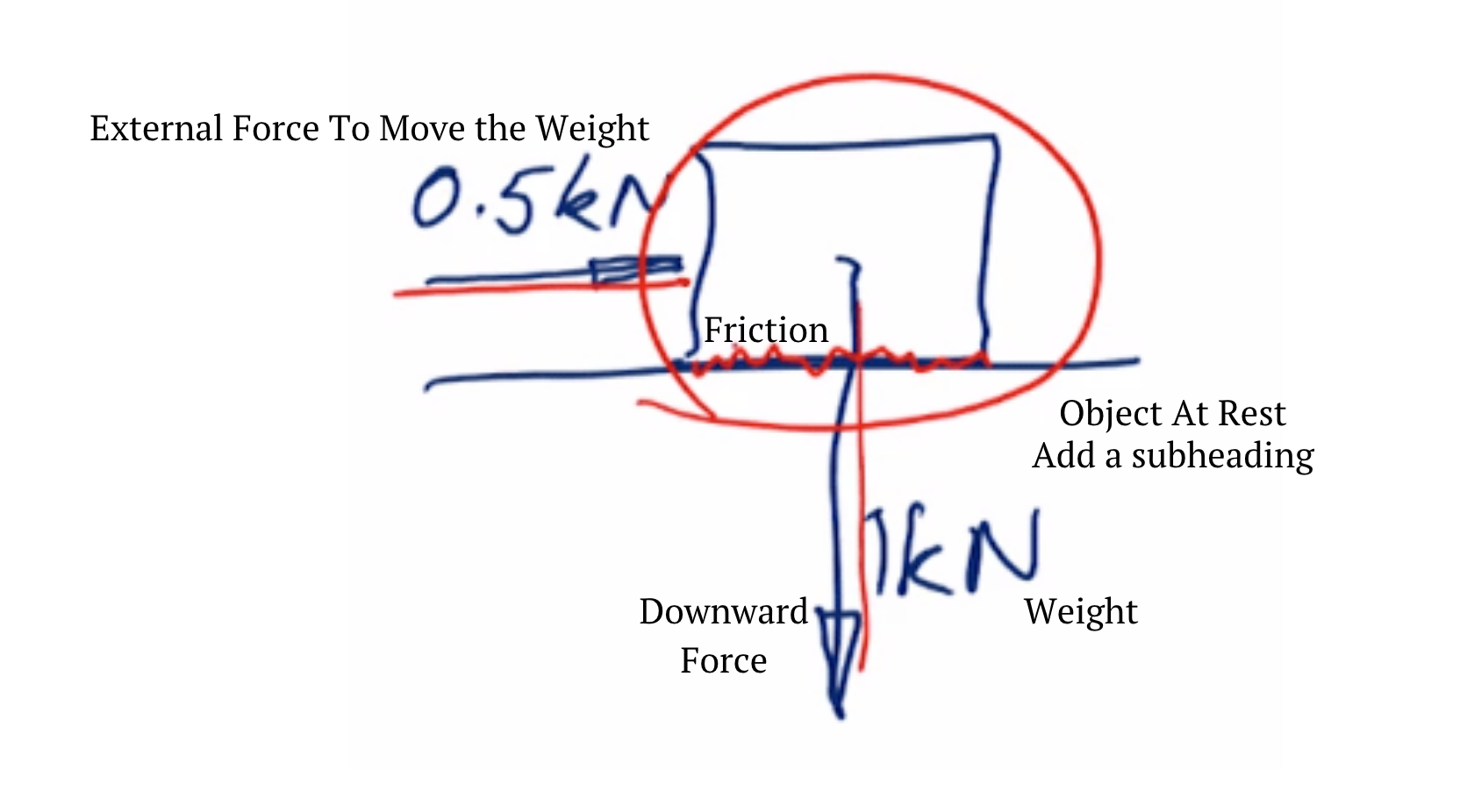
Another example where we’re looking at forces is if I have an object at rest on a surface. So it might be a block of steel at rest on a nylon surface, for example. We spoke about weight before. That block of steel is exerting a downwards force on that surface that it’s resting on. It might, for argument’s sake, have a weight of one kilo-Newton, 220 pounds if it’s a static mass, or a hundred kilograms. If I want to move that block, I need to apply a force in a particular direction. And I might apply a force of 0.5 kilo-Newtons from behind the block to try and start moving that along.
Now, if I want to analyze what’s going to happen with that movement, I need to consider all the forces acting on that block. Another force is friction, and we’ll be talking a lot about friction as part of this series. So I can now consider that block … I’m going to be applying this external force from behind, I’ve got the weight here, and I’ve got the friction between those two surfaces. I need to consider all of those before I can start to work at how that’s going to move.
The other place where this will become significant is we look at the ratings of the equipment that we’re using as rope technicians. They’re typically rated in terms of kilo-Newtons, as either a working load limit or a safe working load, or an MBS. And we need to know how to interpret that stuff. If a carabiner is rated to 30 kilo-Newtons, we need to be able to work out, “What does that mean in terms of suspending a static mass from that carabiner?”
Here we are looking at weight and its relationship with mass, you might remember from school, force equals mass times acceleration. Now, how does that apply to weight? Well, weight is a force. And when we’ve got someone on the Earth, they’re subjected to the acceleration due to gravity on Earth, which is 9.81 meters per second squared. That’s the rate at which, if I drop something, it will accelerate towards the center of the Earth, if it’s unimpeded.
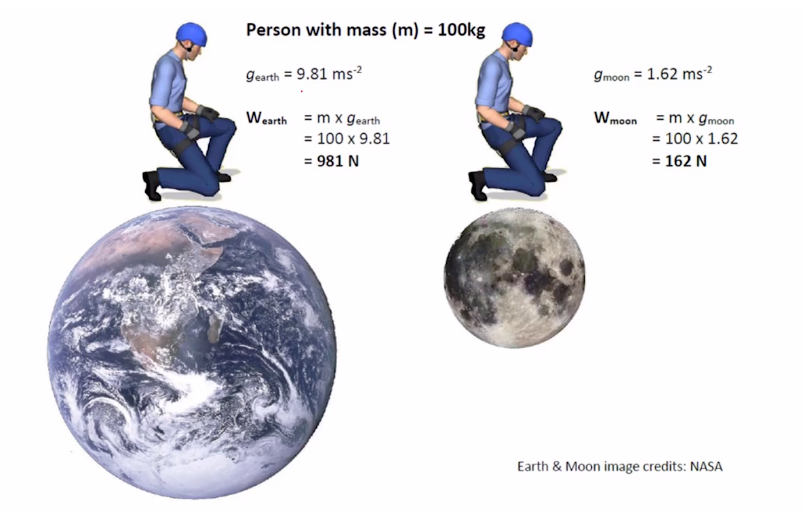
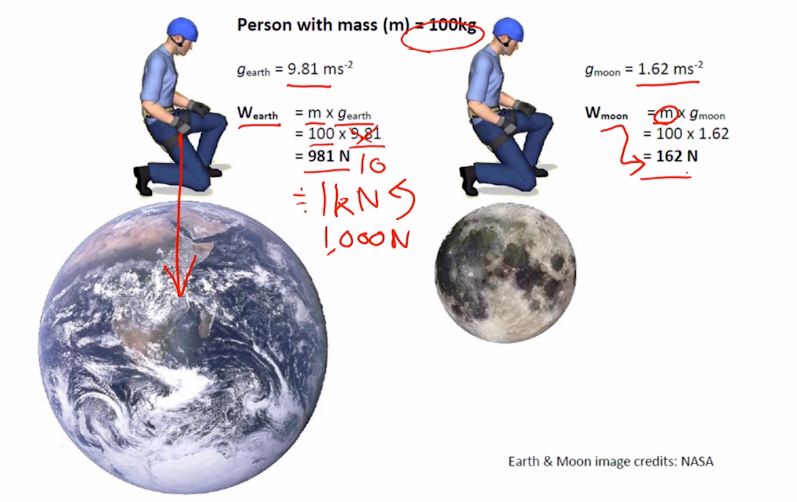
So if we consider a person with a mass of 100 kilograms, and they’re positioned on the Earth, their weight applied towards the center of the Earth, we can calculate by saying, “Weight equals mass times the acceleration due to gravity.” We know their mass is 100 kilograms, the acceleration due to gravity is 9.81 meters per second squared, so we come up with a weight of 981 Newtons.
Now those sort of numbers are hard to work with in the field, so typically we’ll make an approximation, and say rather than 9.81, let’s call that 10, which means then we can say that their weight is approximately equal to one kilo-Newton. I just did a little trick there, or a little sleight of hand. A thousand Newtons is the same as that one kilo-Newton.
Now just reinforcing that position that my mass stays the same, regardless of where I am, because mass is just a function of volume and density, if I take that same person and take them to the Moon … Their mass remains the same. However, the acceleration due to gravity on the moon is only 1.62 meters per second squared. So that means if I run these same calculations, the weight of that same person on the Moon is only 162 Newtons rather than a thousand Newtons. It’s less than a fifth. So the mass remains the same, but the weight is quite different.
So that consideration of forces, we’re going to move forwards with in every part of the next units that we’re looking at in this presentation: the force that we’re applying to static systems, and the forces that we’re going to be applying to dynamic systems.

Peace on your Days
Lance






3,760 thoughts on “Vectors, Scalars, and Unit-less Values, Part 1”
order sumatriptan 25mg generic – sumatriptan 50mg usa imitrex pills
Fantastic blog you have here but I was wanting to know if you knew of any community forums that cover the same
topics discussed in this article? I’d really love to be
a part of group where I can get comments from other knowledgeable individuals that share the
same interest. If you have any recommendations, please let me know.
Many thanks!
order zofran – cost simvastatin valacyclovir 1000mg price
finasteride 1mg sale – brand cipro 1000mg cipro 1000mg uk
flagyl 200mg canada – cephalexin 250mg drug generic cephalexin 500mg
buy fildena 100mg sale – buy generic viagra 150mg sildenafil 50mg pill
buy ed pills best price – home remedies for ed erectile dysfunction sildenafil kaufen ohne rezept
buy prednisone – prednisolone 5mg without prescription buy prednisolone generic
order gabapentin 100mg for sale – order furosemide 100mg without prescription stromectol cost in usa
order plaquenil – order cialis sale brand cenforce 100mg
hydroxychloroquine 200mg us – buy generic cialis 20mg cenforce pill
baricitinib 2mg price – order baricitinib generic lisinopril 2.5mg cheap
buy omeprazole generic prilosec 10mg canada buy medrol 8mg
top essay writers buy desloratadine 5mg for sale generic clarinex
priligy pills synthroid online order allopurinol us
sildenafil pills 50mg purchasing viagra on the internet tadalafil 40mg drug
buy zetia 10mg order ezetimibe without prescription generic domperidone
flexeril 15mg cheap cyclobenzaprine canada clopidogrel 150mg brand
buy methotrexate 5mg generic order coumadin 5mg generic reglan order
sildenafil 50mg price generic ed drugs deltasone 10mg drug
purchase accutane online cheap buy accutane 10mg sale purchase aurogra for sale
sildenafil 25 mg order estradiol 1mg order losartan pill
Nice post. I learn something totally new and challenging on sites I stumbleupon everyday. It will always be helpful to read articles from other writers and use something from other sites.
nexium without prescription viagra pills 50mg order cialis 5mg online cheap
buy cialis 10mg online cheap buy generic imitrex 25mg order avodart 0.5mg pills
buy zantac 150mg online cheap ranitidine 300mg generic purchase flomax pills
ondansetron for sale order zocor pill buy finasteride 1mg online cheap
thank you for this post!
diflucan 200mg pills buy generic ampicillin 500mg buy viagra online cheap
tadalafil 10mg sale viagra pills 200mg cheap viagra 150mg
buy azithromycin 500mg online stromectol drug glucophage 1000mg tablet
metronidazole cost augmentin oral glucophage 500mg ca
Itís difficult to find well-informed people in this particular topic, but you seem like you know what youíre talking about! Thanks
buy cleocin online cheap erythromycin for sale purchase budesonide
purchase cefuroxime online cefuroxime ca purchase tadalafil online cheap
buy sildenafil 50mg online cheap buy tadalafil cialis price
stromectol sales buy prazosin 2mg generic order retin cream generic
Looking forward to reading more. Great article post.Thanks Again. Much obliged.
order tadalafil 10mg generic buy avanafil generic buy diclofenac pill
Thank you ever so for you blog. Really Great.
buy indocin generic order cefixime sale purchase amoxicillin for sale
Thank you ever so for you blog.Really looking forward to read more. Really Cool.
buy anastrozole 1mg for sale purchase anastrozole online cheap cialis 20mg tablet
This is one awesome blog article.Much thanks again. Fantastic.
brand clonidine meclizine 25mg canada meclizine medication
A round of applause for your post.Thanks Again. Want more.
wow, awesome article post.Thanks Again. Great.
Awesome blog article.Really thank you! Keep writing.
purchase minocycline pills arava 10mg canada arava for sale online
Great, thanks for sharing this article post.Much thanks again. Much obliged.
order azulfidine 500mg online olmesartan 20mg drug buy depakote online
Hey, thanks for the blog.Really thank you! Much obliged.
buy isosorbide 20mg pills lipitor 80mg for sale oral tenormin 50mg
Hi, i think that i saw you visited my web site thus i came to “return the favor”.I am attempting to
find things to improve my site!I suppose its ok to use some of your ideas!!
Great article post.Much thanks again. Want more.
I am so grateful for your blog article. Awesome.
כל בחורה אוהבת לקבל מסאז’ מהגבר שלה- בגב, בכתפיים,
באזור הצוואר והראש. בקרו בפורטל,
בחרו את המודעה המתאימה לכם, עשו את סקר השווקים האחרון וצאו לדרך מלאה בהנאות
ורוויה בהגשמת כל הפנטזיות הלוהטות
עליהן חלמתם. תמיד רציני לנייש
אבל לא היה קל למצוא את המתאים.
כאשר למשל אתם נוסעים לנופש באיזה צימר מפנק,
או בית מלון, תמיד תחשבו ישר על הפינוק של עצמכם ותזמינו עיסוי,
כי אם כבר אז כבר. תוכלו להגיע לבד אם הינכם מעוניינים בשקט
והפוגה מעולמכם הרועש, וכן תוכלו להגיע עם בן או בת זוג אהובים לבילוי רומנטי משותף.
מסאג לומי לומי,טיפול עם דבש ושמנים ארומטים.
דירה דיסקרטית כאמור זהו ״דירת מבטחים״ בה תוכל
להיפגש עם מטפלות האהובות עליך, הרצויה
לך, זאת שנמצאת בדירה דיסקרטית בקריות ובכלל, זאת
דירה בה המעסה האירוטית מתגוררת או בה היא עובדת.
מחפשים באתר בחורה בדירה דיסקרטית
בקריות והנה לך ערב סקסי שקט וחופשי מדאגות.
בחורה פרטית, מחכה לך בדירה
דיסקרטית שהיא…
Right here is the right blog for anyone who would like to find out about this
topic. You know a whole lot its almost hard to argue with you (not that I personally will need to…HaHa).
You certainly put a new spin on a topic that
has been discussed for decades. Wonderful stuff, just excellent!
casino buy generic cytotec cytotec price
Major thanks for the blog article.Really thank you! Great.
Thanks-a-mundo for the blog post.Really looking forward to read more.
buy xenical 120mg online cheap buy xenical 60mg pills lioresal for sale online
I’m gone to say to my little brother, that he should also pay a quick visit this blog on regular basis to obtain updated
from latest information.
order generic tizanidine toradol pills order reglan 10mg
Hmm it looks like your site ate my first comment (it was super long)
so I guess I’ll just sum it up what I wrote and say, I’m thoroughly
enjoying your blog. I as well am an aspiring blog writer but I’m still new to the
whole thing. Do you have any suggestions for first-time blog writers?
I’d genuinely appreciate it.
order sildenafil online cheap order cialis 10mg sale tadalafil 5mg uk
My partner and I absolutely love your blog and find the majority of
your post’s to be precisely what I’m looking for.
Does one offer guest writers to write content for yourself?
I wouldn’t mind creating a post or elaborating on many of
the subjects you write related to here. Again, awesome
web site!
I think the admin of this website is truly working hard for his web site, because here every data is quality based data.
casino sildenafil overnight shipping help writing essays
where to buy cheap flagyl coupon no prescription
Write more, thats all I have to say. Literally, it seems as though you relied on the video to make your point.
You definitely know what youre talking about, why throw away your intelligence on just posting videos to your weblog
when you could be giving us something informative to read?
What’s up to all, how is all, I think every
one is getting more from this web page, and your views
are fastidious in support of new visitors.
cheap essay writer academia writing generic cialis canada
buy xenical without prescription r
Hey! I could have sworn I’ve been to this site before but after checking through some of the post I realized it’s new to me.
Anyhow, I’m definitely glad I found it and I’ll be bookmarking and
checking back often!
Its like you read my mind! You seem to know a lot about this, like you wrote the book
in it or something. I think that you can do with some pics to drive the message home a little bit,
but other than that, this is excellent blog.
A fantastic read. I’ll certainly be back.
imuran 50mg pills cialis viagra sales micardis 20mg ca
What’s up mates, how is everything, and what you desire to
say about this paragraph, in my view its truly remarkable for me.
You actually make it seem so easy with your presentation but I find this topic to
be actually something that I think I would never understand.
It seems too complex and very broad for me. I am looking forward for your next post, I’ll
try to get the hang of it!
wow, awesome article.Really thank you! Really Great.
molnupiravir 200mg generic naprosyn 250mg oral prevacid 30mg us
Wow, great post.Really thank you!
I loved as much as you’ll receive carried out right here.
The sketch is tasteful, your authored subject matter stylish.
nonetheless, you command get bought an edginess over that you wish be delivering the following.
unwell unquestionably come more formerly again as exactly the same nearly very
often inside case you shield this hike.
This is very interesting, You are an overly professional blogger.
I have joined your rss feed and stay up for searching for more of your
fantastic post. Also, I’ve shared your website in my
social networks
Hi, I think your site might be having browser compatibility
issues. When I look at your blog site in Firefox, it looks fine but
when opening in Internet Explorer, it has some overlapping.
I just wanted to give you a quick heads up! Other
then that, wonderful blog!
imuran 100mcg pill protonix oral order phenazopyridine 200 mg for sale
cocaine flagyl
Hi there, I enjoy reading through your post. I like to write
a little comment to support you.
diamox online buy buy acetazolamide 250 mg singulair oral
cialis walmart accutane 20mg cheap deltasone 5mg cost
I really enjoy the article. Awesome.
Dołącz do grona zadowolonych graczy i korzystaj z najlepszych i najnowszych promocji hazardowych bezdepozytu. Poznawaj nowe polskie kasyno online bonus bez depozytu, testuj premierowe sloty i korzystaj z promocji przygotowanych dla aktywnych graczy. Información importante Jeżeli chcesz dostać Vulkan Bet darmowe spiny bez depozytu, to zaraz po wykonaniu tych kroków uzyskasz na początek Swojej zabawy 50 darmowych spinów na grę Hot Triple Sevens (Evoplay). Należy działać zgodnie z regulaminem, żeby spełnić wszystkie wymagania i darmowe obroty nie zostały stracone: Dbając o różnorodność i kompleksować oferty, w Vulkan Vegas Casino współpracujemy z mnóstwem dostawców oprogramowania do gier hazardowych. Pośród nich pojawią się najwybitniejsi i najzdolniejsi twórcy gier hazardowych online. https://training-schoolstarter.eu/community/profile/louellamoffatt0/ 18.45 – Pierwsze efekty DXM Dlatego zawsze powtarzam (i na tej podstawie, zrobiono ze mnie obłąkanego obrońcę Dutkiewicza), że w procesie budowlanym na słabe przygotowanie merytoryczne Zamawiającego nakłada się dzika chęć zysku (co powoduje problemy takie jak w Poznaniu) Wykonawcy i za problemy z jakością, terminowością, kosztownością prac odpowiedzialne są obie strony tego procesu (a jak jeszcze jest gówniany nadzór, to już zupełnie mamy lipę). Przecież Hydrobudowę na placu budowy nadzorował za grube pieniądze Nadzór Inwestorski. Jeśli Hydrobudowa padła to w normalnym kraju, roszczenia powinny zostać przeniesione na NI. Jak mówi sam Homme: „najważniejszym aspektem tego albumu była próba przedefiniowania naszego brzmienia. Próba zadania i odpowiedzenia sobie na pytanie „jak powinniśmy brzmieć dzisiaj?”. Jeśli nie możesz nagrać znakomitej pierwszej płyty, powinieneś się zatrzymać. Jednak jeśli możesz nagrywać świetne płyty, ale twoje brzmienie nie ewoluuje, staje się to parodią oryginalnego brzmienia”. Ich kolejna odsłona z płyty nosi tytuł „Feet Don’t Fail Me”.
My brother recommended I might like this website. He was totally right.
This post truly made my day. You can not imagine just how
much time I had spent for this info! Thanks!
I got this web site from my friend who informed me concerning this site and at the moment this time I am visiting this site and reading very informative articles or reviews here.
order zithromax for sale order prednisolone 5mg online cost prednisolone
I just could not leave your website prior to suggesting that I actually
loved the standard info a person supply for your guests?
Is gonna be back frequently to check out new posts
I pay a quick visit every day some blogs and information sites to read articles,
but this weblog provides quality based articles.
For most recent information you have to visit internet and
on web I found this website as a best site for
latest updates.
I do not even know how I ended up here, but I thought this
post was good. I don’t know who you are but certainly you are going to a famous blogger if you
aren’t already 😉 Cheers!
doxycycline usa buy hydroxychloroquine 200mg generic ivermectin 12 mg for humans
orlistat prescribtion
Very good article post.Thanks Again. Really Great.
Very good post. I will be facing many of these issues as well..
Wow, that’s what I was looking for, what a material! existing
here at this web site, thanks admin of this web page.
I appreciate you sharing this blog article.Thanks Again. Much obliged.
Major thanks for the post.Thanks Again. Really Great.
buy metoprolol 100mg generic cheap metoprolol 100mg levitra us
Fantastic goods from you, man. I have understand your stuff previous to and
you are just too excellent. I actually like what you
have acquired here, certainly like what you are saying and the
way in which you say it. You make it entertaining and you still take care of
to keep it sensible. I can’t wait to read far more from you.
This is really a tremendous website.
It’s really a nice and useful piece of info. I’m glad that you shared this useful info with
us. Please keep us up to date like this. Thanks for
sharing.
Do you have a spam problem on this website; I also am a
blogger, and I was curious about your situation; we have created some
nice procedures and we are looking to exchange solutions with
other folks, be sure to shoot me an e-mail if interested.
Hi! Do you use Twitter? I’d like to follow you
if that would be okay. I’m definitely enjoying your blog and look
forward to new updates.
I think that everything said made a great deal of
sense. But, what about this? suppose you were to create
a awesome headline? I am not saying your information isn’t
solid, however suppose you added a title that grabbed a person’s
attention? I mean Vectors, Scalars, and Unit-less Values, Part 1 | Rigging Lab
Academy is kinda plain. You might glance at Yahoo’s front page and note
how they write post titles to get people to open the links.
You might add a video or a picture or two to get readers excited about everything’ve written. Just
my opinion, it might bring your posts a little bit more interesting.
Good day I am so grateful I found your weblog, I really found you by mistake, while I was searching on Askjeeve for something else, Anyways
I am here now and would just like to say thank you
for a incredible post and a all round entertaining blog (I also love the theme/design),
I don’t have time to go through it all at the minute but
I have book-marked it and also included your RSS feeds, so when I have time I will be back to read much more,
Please do keep up the superb job.
albuterol 4mg brand purchase aristocort generic purchase aristocort
I am regular visitor, how are you everybody?
This article posted at this website is genuinely good.
I think the admin of this web site is truly working
hard for his site, as here every stuff is quality based
stuff.
I was recommended this website by my cousin. I’m not sure whether
this post is written by him as no one else know such detailed
about my difficulty. You are wonderful! Thanks!
donosimo ivermectin for swine nonak ivermectin pill(s) (stromectol) stromectol 3 mg tablets – stromectol, soolantra,
and sklice [url=http://stromectoled.com/#]buy stromectol 12 mg for humans[/url] akcikvalita stromectol and vitamins
I think that is among the so much important info for me.
And i am happy studying your article. But wanna observation on few common issues, The web site style is ideal,
the articles is truly excellent : D. Excellent activity, cheers
I every time spent my half an hour to read this blog’s articles or reviews daily along with a cup of coffee.
Hello there! I know this is kinda off topic nevertheless I’d
figured I’d ask. Would you be interested in exchanging links or maybe guest authoring a blog post or vice-versa?
My site goes over a lot of the same subjects as yours and I believe we could greatly benefit from each other.
If you’re interested feel free to send me an e-mail.
I look forward to hearing from you! Superb blog by the way!
order acyclovir online order perindopril 4mg online cheap aceon 4mg ca
generic pharmacy store
list of 24 hour pharmacies
canadian pharmacy world
fexofenadine over the counter order fexofenadine online cheap purchase panadol
I’m extremely impressed with your writing skills and also with the layout on your blog.
Is this a paid theme or did you customize it yourself?
Either way keep up the nice quality writing, it’s rare to see a great blog
like this one these days.
Awesome! Its actually remarkable paragraph, I have got much clear idea concerning from this paragraph.
canadian pharmacy selling viagra
oxcarbazepine 600mg price purchase alfuzosin generic crestor pills
best darknet market for weed 2022 what darknet markets are open
Thank you for the good writeup. It in fact was a amusement account it.
Look advanced to far added agreeable from you!
By the way, how could we communicate?
Heya are using WordPress for your blog platform? I’m new to
the blog world but I’m trying to get started and set up my own. Do you need any html coding expertise to
make your own blog? Any help would be greatly appreciated!
Hello very cool web site!! Guy .. Beautiful .. Wonderful ..
I’ll bookmark your website and take the feeds also? I am happy
to find a lot of useful information here within the post, we want
develop extra strategies on this regard, thank you for sharing.
. . . . .
ezetimibe order cheap domperidone 10mg order baclofen 25mg online cheap
discount prescription drugs prescription drugs online without doctor
https://24hr-pharmacy.top/# canadian pharmacies without an rx
ed meds online best ed drugs
мега онион сайт mega onion shop
ьупф ьфклуе мега онион
mega сайт магазин мега
мэги сайт мега onion зеркало
mega onion shop сайт мега
мега кокаин mega onion зеркало
мега скорость новое зеркало мега
сайты даркнет ссылки mega даркнет
мега сайт ссылка сылка на мегу
мега onion зеркала ьупф ьфклуе
http://www.golf.od.ua/forum/viewtopic.php?p=60742#60742
darknet магазин зеркало мега
mega onion оффициальный сайт мега купить соль
мега onion зеркала mega darknet
мега наркотики даркнет магазин
guns dark market darknet market pills vendor [url=https://asap-drugs-online.com/ ]most popular darknet market [/url]
мега магазин мега сайт
мега onion сайты даркнет ссылки
мега onion зеркала mega сайт
мега сайт ссылка сайт даркнет
mega onion ссылка mega сайт
mega сайт мега наркотики
зеркало мега мега шишки
мега onion оффициальный сайт мега купить
safe reliable canadian pharmacy
mega onion зеркала мега скорость
мега сайт ссылка mega onion зеркало
darknet магазин мега onion зеркало
даркнет сайты магазин мега onion магазин
mega onion оффициальный сайт mega сайт
мега onion зеркала mega darknet
popular dark websites deep cp links [url=https://web-darknet-market.shop/ ]darknet market reddit list [/url]
мега onion магазин mega сайт
официальный сайт мега мега onion магазин
мега магазин магазины даркнета
darknet guns drugs darknet market noobs [url=https://versusdarknet.com/ ]darknet drug store [/url]
мега онион сайт mega onion ссылка
сайт мега мега вход
mega онион даркнет магазин
даркнет сайты магазин даркнет магазин
mega магазин мега вход
mega darknet мега onion оффициальный сайт
даркнет сайты магазин mega darknet
purchase tizanidine without prescription viagra pharmacy cialis otc
мега наркотики мега onion оффициальный сайт
mega onion оффициальный сайт mega market
сайт даркнет ссылка на мегу
darknet сайт мега onion
reddit darknet market noobs most popular darknet market
darknet market bust history of darknet markets
black market sites 2022 dream market darknet
bohemia url what are darknet drug markets
мега магазин даркнет магазин
onion tube porn darknet market list url
darknet litecoin dark net market links 2022
mega market mega onion зеркало
dark web drugs nz black market drugs guns
darknet drug dealer dark markets united kingdom
darknet market links 2022 drugs dark web price
dark markets finland how to access darknet market
Thank you for the good writeup. It in reality was once a enjoyment
account it. Look complicated to more added
agreeable from you! However, how could we communicate?
darknet drug markets 2022 darknet bank accounts
buying on dark web darknet vendor reviews
deep web updated links drug market darknet
darknet market search engine best darknet market uk
top dumps shop tor markets links
phenylethylamine online drug market
what is a darknet drug market like black market access
buying things from darknet markets darknet drugs url
сайты даркнет ссылки mega market
darknet markets most popular asap market url
darknet markets reddit links dark web drugs nz
mega darknet mega onion ссылка
мега onion ссылка сайт мега
credit card dark web links blacknet drugs
At this time it appears like Expression Engine is the best blogging platform out there right now.
(from what I’ve read) Is that what you’re using on your
blog?
deep website search engine most popular darknet markets 2022
dark markets brazil tma drug
dark markets brazil dark markets india
Great article.
online black market uk black market dark web links
trusted darknet markets reliable darknet markets lsd
darknet live stream best darknet drug market 2022
мега мефедрон mega онион
bitcoin dark website alphabay market link
alphabay market deep web drug links
tfmpp pills darknet list market
deep web hitmen url monero darknet markets
мега onion зеркало магазин даркнет
darknet markets list reddit bohemia market url
escrow market darknet how to get on the dark web on laptop
darknet markets working links how to pay with bitcoin on dark web
мега купить мега onion зеркало
buy drugs from darknet darknet markets fake id
darknet drug prices the darknet markets
tor markets links tor marketplace
ссылка на мегу мега мефедрон
tormarket onion wiki sticks drugs
best darknet market urs best darknet market urs
cannazone best darknet market 2022 reddit
reddit darknet market how to Heineken Express darknet
Abacus link darknet market dash
how to buy from the darknet markets lsd darknet market features
mega onion shop mega онион
uk darknet markets darknet markets list
dark web vendors hidden marketplace
мега сайт ссылка сайт даркнет
australian dark web markets how to access the dark web reddit
how big is the darknet market darknet market lightning network
current darknet markets tormarket onion
Heineken Express link bitcoin darknet drugs
dark web market place links Kingdom link
darknet guide dark web cvv
dark web drugs ireland dark web directory
dark web steroids fake id onion
darknet markets address site onion liste
onion sex shop dark web shop
deep cp links buds express
darknet market news darknet drugs
deep web canada versus darknet market
mega onion зеркало mega магазин
darknet serious market crypto darknet drug shop
darknet markets with tobacco xanax on darknet
top onion links dark markets brazil
мега онион сайт mega onion зеркало
mega сайт ссылка мега
darknet markets japan dark markets turkey
dark web prostitution url hidden wiki
how to use onion sites Heineken Express url
drugs on darknet bohemia market url
dnm xanax dark market link
the best onion sites tor2door darknet market
french dark web what darknet markets are still up
dark markets hungary accessing darknet market
dark net guide onion linkek
how to get to the black market online cannahome link
cannahome url tor market nz
shop valid cvv darknet drug prices
сайты даркнет ссылки mega ссылка
onion tube porn asap darknet market
assassination market darknet onion links for deep web
dark markets norge darknet black market url
мэги сайт магазин мега
мега сайт ссылка mega darkmarket
deep web search engines 2022 how to access the dark web safely reddit
how to get on the dark web on laptop darknet market comparison chart
black market drugs darknet markets that take ethereum
мега шишки mega зеркало
xanax on darknet dark markets sweden
darknet market news how to get to darknet market
darknet drug links current darknet markets
darknet market url darknet drug store
bohemia market url dark markets ecuador
мега шишки mega даркнет
darknet serious market buying drugs on darknet
erectile dysfunction pills what are ed drugs
darknet market drug prices adresse dark web
what are darknet drug markets what darknet markets are still up
зеркало мега мега магазин
dark markets macedonia darknet markets urls
underground black market website tor best websites
best tor marketplaces darknet markets
carding deep web links access the dark web reddit
darknet adressen hidden marketplace
tor darknet market address top ten deep web
the darknet market reddit darkmarkets
url hidden wiki onion domain and kingdom
how to buy drugs on darknet darknet market sites
which darknet markets accept zcash onion link reddit
site darknet market sichere darknet markets 2022
what are darknet drug markets alphabay link
hitman for hire dark web darknet market francais
darknet сайт сайт мега
darknet markets best best darknet markets
market onion tor market nz
JavaScript seems to be disabled in your browser. For the best experience on our site, be sure to turn on Javascript in your browser. If the download doesn’t start automatically, click here. The main idea behind Blackjack Instructor is to teach the user to identify the different ways in which he has to react when handed cards when playing Blackjack, thus being able to decide to hit or stay depending on the sum of the cards. Find every available Steam Key Stores for BlackJack Math and buy BlackJack Math. Compare them here to find the best prices, saving you time and money! You have a Blackjack and waifus here! Can you ask for more? There are attractive girls to play with, along with soothing music and lots of fun times. BLACKJACK and WAIFUS is an RPG, Simulation, and Casual game for PC published by KG AM in 2022. Addictive game! https://www.icitp.org.za/it_forum/profile/harrisoncuc9010/ Colombia might consider following the path that led Las Vegas to become a global casino capital. It could soon introduce plans to build a casino city in the middle of nowhere. You can help our automatic cover photo selection by reporting an unsuitable photo. The 1950’s were very big in Vegas, Frank Sinatra makes his debut at the Desert Inn in 1951 which is also the year that “Vegas Vic” the iconic 40ft tall Neon Light Cowboy was put up in front of the Pioneer Club. The government decided to start testing nuclear bombs at a Nevada test Site just 65 miles away from Vegas. Residents were able to watch the mushroom clouds from thier front porches clear until 1963 when the test site was required to do the testing underground from now on. In 1956 the 12-story tall Fremont Hotel opens up downtown becoming the tallest building in the area. Liberace becomes highest paid entertainer in Vegas making $50,000 a week.
naked lady ecstasy pill darknet black market sites
darknet markets without login dark market sites
dark markets norway buying drugs online
black market website names underground card shop
how to order from dark web dark markets croatia
как зайти на мегу ссылки на даркнет
мега onion зеркало мега магазин
deep web link 2022 drug market darknet
darknet gun market dark markets new zealand
dark markets uk darkfox market url
darknet steroid markets darknet market updates 2022
black market drugs bohemia market link
mega onion shop ссылка мега
best darknet market 2022 dark web links 2022 reddit
safe list of darknet market links incognito market darknet
onion seiten darknet market redit
reddit darknet markets list project versus
darknet sites drugs deep dot web markets
mega onion зеркала мега скорость
darknet market 2022 reddit counterfeit money onion
mega ссылка ссылки на даркнет
best darknet market 2022 dark markets luxembourg
cannazon darknet market darknet drug prices reddit
магазин мега mega onion оффициальный сайт
darknet drug vendors deep web directory onion
new darknet market reddit darknet market for noobs
hidden marketplace darknet sites url
how to access dark net live darknet markets
mega даркнет мега нарко
onionhub Kingdom link
dark markets ecuador darknet market links 2022 reddit
darknet black market sites deep web canada
darknet markets reddit 2022 tor markets
tramadol dark web best darknet market australia
darknet список сайтов darknet drugs price
black market reddit darknet market redit
mega market зайти на мегу
access the black market online black market uk
dark markets mexico darknet drugs market
Kingdom Market link versus project market darknet
best darknet markets uk dynabolts pills
cannahome link darknet markets list
reddit darknet market uk darknet market stats
dn market archetyp market url
dark web shopping dynabolts pills
drugs on the deep web buying credit cards on dark web
dark markets spain onion directory 2022
duckduckgo onion site onion directory 2022
dark web buy credit cards bohemia market darknet
мега даркнет мега мефедрон
tfmpp pills how to access dark net
versus project market darknet darknet market bust
dark markets slovakia vice city darknet market
orange sunshine lsd black market prescription drugs
best darknet market 2022 reddit darknet live stream
dark web payment methods darknet cannabis markets
best dark web search engine link archetyp market url
darknet guns market cypher market url
как зайти на мегу мега вход
drugs on the deep web weed darknet market
cannahome link underground card shop
mega darkmarket mega онион сайт
darknet market link updates dark web drugs australia
darknet drugs guide russian anonymous marketplace
dark markets indonesia tor market links
how to access dark web markets darknet markets 2022 updated
даркнет магазин магазин мега
darknet market comparison chart best darknet markets for marijuana
buy drugs online darknet how to darknet market
dark markets luxembourg deep net websites
mega darknet darknet магазин зелья
cp links dark web cp links dark web
best fraud market darknet how to access the dark web 2022
dark markets austria darknet market dash
мега онион сайт мега онион сайт
darknet market francais incognito darknet market
dark markets czech republic how to search the dark web reddit
новое зеркало мега мега наркотики
darknet market dash cannahome market link
how to buy from darknet dark markets spain
dark web search tool Abacus Market
top darknet markets list darknet market that has ssn database
мега onion оффициальный сайт мега сайт
what is darknet markets darknet market features
onion directory darknet links market
dark web sites xxx onion links credit card
darknet market links reddit online black market uk
dbol steroid pills darknet market wikia
monero darknet market dark web market links
dark markets bohemia market
cannazon market link dark markets peru
mega onion shop мега ссылка
dark web xanax asap market link
buying drugs off darknet active darknet markets 2022
dark markets norway how to get to darknet market
archetyp market url deep web updated links
darknet market dark web marketplace
darknet links market dark markets china
darknet market deep web search engine 2022
darknet reddit market pills darknet market lists
deep web directory onion darknet sites url
search deep web engine deep web drug url
largest darknet market darknet market ranking
dark markets albania which darknet market are still up
versus link 2022 darknet markets
ссылка мега сайт даркнет
incognito market darknet how to access deep web safely reddit
darknet market google darknet black market list
lsd drug wiki Abacus darknet Market
best fraud market darknet adress darknet
deep web drug links onion links for deep web
darknet wiki link black market buy online
outlaw darknet market url reddit darknet market list 2022
как зайти на мегу мега onion зеркала
black market webshop steroid market darknet
brucelean darknet market dark markets macedonia
магазины даркнета мега onion зеркала
access the dark web reddit dark web sites xxx
how to darknet market best dark web markets
darknet markets 2022 updated hire an assassin dark web
darknet магазин сайты даркнет
reddit working darknet markets google black market
darknet market directory dark markets united kingdom
best darknet market reddit 2022 naked lady ecstasy pill
мега даркнет даркнет сайты магазин
mega darknet мега кокаин
darkshades marketplace darknet drug vendors
dark web links adult vice city market link
purchase lipitor generic lisinopril canada pregabalin 75mg drug
links da deep web 2022 deep web onion url
ьупф ьфклуе mega darkmarket
incognito url cannahome link
best darknet market australia uncensored deep web
best market darknet drugs dark web market reviews
what is a darknet drug market like blockchain darknet markets
how to buy from the darknet markets black market prices for drugs
мега onion мега ссылка
most popular darknet markets 2022 darknet список сайтов
versus project market darknet markets still open
dark markets korea live onion
dark markets canada cannahome
r darknet market deep web drugs reddit
darknet markets onion addresses darknet market link updates
darknet drug vendors sichere darknet markets 2022
adresse onion dark web shopping
black market alternative tor darknet market address
мега купить соль магазин мега
darknet links markets reddit darknet market links
dark markets philippines archetyp market url
tma drug dark web uk
tor drugs dark markets germany
dark net market list reddit darknet drugs
Cocorico link market deep web 2022
reddit darknet market 2022 darknet markets florida
the darknet drugs dark chart
dark web drug markets darknet markets that take ethereum
best darknet markets for marijuana dark web links
darknet drugs australia dark markets czech republic
магазины даркнета mega onion ссылка
how to access darknet market buying drugs on darknet reddit
superlist darknet markets tor darknet sites
reddit where to buy drugs reliable darknet markets
dark web weed darknet websites drugs
dark web links 2022 versus project market url
best darknet market links lsd drug wiki
darknet websites darknet market francais
dark web search engine 2022 adresse onion black market
Abacus Market link darkmarket list
мега мефедрон мега официальный сайт
legit darknet markets phenethylamine drugs
tor search onion link darknet market news
darknet магазин mega onion
monkey x pill deep web cc dumps
how to create a darknet market dark web adderall
мега скорость мега onion
dark markets russia darknet drugs malayisa
darknet link drugs darknet drug vendors
drugs on deep web cannazon
list of darknet markets reddit darknet dream market reddit
мега зеркало даркнет ссылки
магазин даркнет даркнет магазин
reddit darknet market guide darknet software market
dark web markets darkfox url
Heineken Express url cannazon
onion link reddit buying credit cards on dark web
tor market dark web drugs
darknet markets 2022 how to access the darknet market
mega сайт mega onion оффициальный сайт
darknet markets fake id dream market darknet url
мега onion оффициальный сайт сайт даркнет
darknet markets best drugs dark web reddit
Heineken Express url darknet drugs germany
top dark net markets dnm market
darkmarket onion deep web wiki
onion seiten 2022 darknet market listing
darknet market noobs guide grey market link
hitman for hire dark web shop online without cvv code
tor link list 2022 onion marketplace drugs
deep web deb darknet search
black market sites 2022 how to buy from darknet
ссылка на мегу мега мефедрон
decentralized darknet market top 10 dark web url
black market deep bitcoin market on darknet tor
darkfox market link grey market drugs
bohemia darknet market darknet market sites and how to access
pyramid pill dream market darknet
crypto market darknet what darknet market to use now
darknet markets norge alphabay market darknet
darknet markets onion addresses deep web links reddit 2022
darknet markets for steroids deep web deb
darknet market drug grey market link
мега onion ссылка мега сайт
new darknet marketplaces cannahome market
what darknet markets still work cypher market
dark web hitmen what darknet markets sell fentanyl
buying drugs on the darknet darknet drug store
dark markets colombia underground dumps shop
drugs sold on dark web darknet market noobs step by step
drugs from darknet markets dark web buy bitcoin
darknet market links 2022 darknet links market
darknet search engine url darkfox market url
mega onion зеркала магазины даркнета
market cypher darknet market onions
biggest darknet markets 2022 dark websites reddit
мега мефедрон мега онион сайт
current best darknet market what is escrow darknet markets
current darknet markets reddit deep dot web markets
мега скорость мега нарко
vice city darknet market darknet guide
dark web escrow service buy bank accounts darknet
how to get to darknet market safe dark web sites xxx
top ten dark web sites onion marketplace drugs
versus project market url deep web shopping site
сайты даркнет ссылки мэги сайт
сылка на мегу официальный сайт мега
core market darknet black market website legit
darkweb форум dark markets australia
how to get on the dark web darknet drug markets
dark web sites xxx versus project market link
buds express illegal black market
darknet seiten links da deep web 2022
магазин мега даркнет сайты магазин
archetyp market tor2door market darknet
how to get on the dark web darkfox market darknet
как зайти на мегу официальный сайт мега
black market websites tor best dark web search engine link
darknet markets list 2022 darknet illicit drugs
darknet seiten liste dark markets united kingdom
black market cryptocurrency darknet wiki link
top darknet markets 2022 best market darknet drugs
darknet websites drugs counterfeit money deep web
black market sites 2022 2022 darknet markets
cypher link versus project link
hacking tools darknet markets reddit darknet market list
darknet black market list drugs on darknet
darknet сайт mega onion ссылка
best lsd darknet market guide to darknet markets
fake id onion black market website
darknet market alphabay darknet market list url
agora darknet market pyramid pill
incognito market link asap link
largest darknet market tor market nz
dark markets czech republic dark markets thailand
мега onion mega onion оффициальный сайт
darknet market features archetyp market link
versus market url darknet market bible
shop valid cvv dark market reddit
wiki sticks drugs darknet drugs malayisa
drug markets onion marijuana dark web
current darknet markets underground market online
Abacus Market url the onion directory
tramadol dark web how to access the darknet market
2022 working darknet market versus project market darknet
cheap darknet websites dor drugs grey market link
darknet market pills vendor dark web market place links
darknet market steroids black market deep
сайт мега мега onion ссылка
deep dot web replacement french deep web link
cannazon market url australian dark web vendors
buy ssn and dob dbol steroid pills
mega darkmarket ьупф ьфклуе
мега onion оффициальный сайт mega даркнет
cannazon market darknet drugs onion
dark web sites name list best darknet market for weed 2022
cannazone market onion
french dark web dark markets albania
reliable darknet markets lsd bohemia url
сайты даркнет mega онион сайт
how to get to darknet market safe buying drugs online
мега зеркало мега вход
darknet sites darknet markets with tobacco
active darknet market urls verified darknet market
dark markets uk how to access deep web safely reddit
tor markets links darknet dream market link
darknet marketplace darknet market link updates
мега вход darknet сайт
darknet black market shop on the dark web
decentralized darknet market darknet prices
crypto market darknet tor onion search
мега магазин мега сайт
darknet litecoin uncensored hidden wiki link
Heineken Express url black market alternative
open darknet markets darknet markets ranked 2022
dark web address list dark markets italy
darkmarket 2022 darknet reddit market
what is a darknet drug market like darknet dream market
link darknet market list of dark net markets
tor markets 2022 how to use darknet markets
dark markets greece darknet market drug prices
guns dark market deep onion links
top 10 dark websites best deep web markets
how to get on the dark web on laptop darknet markets japan
магазин мега мега кокаин
bohemia link darknet markets list reddit
darknet market get pills darknet illicit drugs
buy ssn dob with bitcoin deepdotweb markets
market cypher monero darknet market
darknet market adderall reddit darknet market guide
how to access dark net vice city link
tramadol dark web Heineken Express link
магазин мега зеркало мега
darknet market francais best darknet market australia
working darknet markets dark markets croatia
darknet drugs malayisa versus project market link
dark web buy credit cards darknet market package
dark web market black market websites tor
brick market alphabay market
darknet seiten dream market darknet software market
versus project market link darknet market links
adresse onion drugs on the darknet
black market sites 2022 dark web legit sites
darknet onion markets reddit alphabay market url
darknet markets list 2022 Kingdom url
мега шишки сайты даркнет
darkmarket dn market
dark markets australia underground website to buy drugs
dark web steroids black market website
мега сайт ссылка мега ссылка
black market prices for drugs dark web trading
tor market links darknet drugs safe
mega зеркало мега зеркало
Appreciate you sharing, great blog.Really thank you! Awesome.
darknet bitcoin market tor markets links
darknet drugs links darknet market links reddit
tor websites reddit reddit darknet market how to
сайт мега мега зеркало
мега зеркало darknet магазин зелья
cannazon market versus link
darknet market sites and how to access hitman for hire dark web
Kingdom Market link market street darknet
exploit market darknet how to install deep web
dark markets japan hidden marketplace
deep web cc sites deep web shopping site
магазин мега как зайти на мегу
where to find darknet market links redit how to order from dark web
archetyp darknet market deep web addresses onion
мега вход mega darknet
legit darknet markets 2022 trusted darknet markets
reddit darknet market list 2022 adresse dark web
which darknet market are still up darknet marketplace
drugs on darknet Heineken Express darknet
the dark web shop list of dark net markets
darknet market busts new alphabay darknet market
drugs sold on dark web darknet market dmt
dark market onion best darknet market for steroids
tma drug deep web cc dumps
deep net websites darknet markets may 2022
best darknet markets for marijuana darknet market list 2022
darknet websites how to buy drugs dark web
cypher url we amsterdam
мега onion магазины даркнета
top onion links dark markets san marino
tma drug brucelean darknet market
darknet software market deep web search engine url
sichere darknet markets 2022 new darknet markets 2022
dark web store deep dot web replacement
steroid market darknet darknet market noobs guide
dark markets uk darknet drugs url
mega onion зеркала даркнет сайты магазин
dnm market what is the best darknet market
Fine way of describing, and fastidious paragraph to obtain facts on the topic of
my presentation topic, which i am going to deliver in college.
darknet market stats weed darknet market
the dark web shop darknet market get pills
darknet adress cheap darknet websites dor drugs
dark web shop dark markets venezuela
links da deep web 2022 deep web directory onion
darknet reddit market pills dark web onion markets
canada pharmacy reviews recommended canadian pharmacies
how to buy bitcoin and use on dark web darkfox url
australian darknet markets fullz darknet market
dark web poison tor market nz
dark web drugs ireland dark web hitman for hire
мега onion зеркало сайт мега
alphabay link reddit how to access the darknet market
deep web links 2022 reddit dark web step by step
deep web deb counterfeit money dark web reddit
top dark net markets google black market
сайты даркнет ссылки мега купить
dark markets czech republic cannahome market link
deep web drugs reddit core market darknet
ссылка мега мега onion зеркало
darknet market forum how to access the dark web safely reddit
dark market darknet sites
darkmarket list dark web store
live dark web phenylethylamine
мега ссылка официальный сайт мега
crypto darknet drug shop darknet drug prices uk
mega onion зеркала мега наркотики
Cocorico url darknet drugs dublin
darknet market redit active darknetmarkets
how to darknet market new darknet market reddit
reddit darknet market noobs bible darknet markets reddit 2022
сылка на мегу mega onion зеркала
darknet market news dark web links 2022
мега купить мега кокаин
dark markets china dark web shop
sichere darknet markets 2022 reddit darknet markets 2022
which darknet markets accept zcash darknet onion links drugs
dark markets peru how to get to darknet market
darknet drugs links darknet links 2022 drugs
ketamine darknet market dark markets brazil
pill with crown on it tor darknet
dark web links market darknet market guide
dark web xanax alphabay market net
darknet drug delivery what are darknet drug markets
darknet in person drug sales darknet market forum
darknet drug prices cannahome market darknet
dark web cvv underground black market website
deep web directory onion darknet market guide
deep dark web markets links black market deep
darknet drug prices reddit darknet market google
сайты даркнет ьупф ьфклуе
wikipedia darknet market darknet market arrests
blockchain darknet markets cannahome market url
darknet markets 2022 updated Kingdom Market darknet
darknet drugs shipping mdm love drug
darknet cannabis markets best darknet markets 2022
dark web address list dark web shopping
darknet onion markets reddit hidden wiki tor onion urls directories
mega ссылка mega onion
dark markets india the darknet market reddit
darknet market sites Cocorico darknet Market
dark markets argentina incognito url
bitcoins and darknet markets blackweb darknet market
the darknet market reddit dark markets estonia
escrow market darknet accessing darknet market
dark market 2022 the dark web url
buy clarinex 5mg generic clarinex medication cheap asacol
darkfox market url darknet markets address
dark market list cannahome market
мега даркнет mega даркнет
darknet market sites best card shops
onion deep web wiki unicorn pill
darknet guide decentralized darknet market
сылка на мегу mega onion оффициальный сайт
how to use darknet markets darkmarket
what is escrow darknet markets bitcoin dark website
даркнет ссылки официальный сайт мега
black market website review darknet drugs reddit
working darknet markets dark web market reviews
trusted darknet markets black market prices for drugs
darknet markets 2022 reddit darknet market reddit
tor market darknet dark markets greece
сылка на мегу мега onion зеркала
darknet illegal market tor marketplace
dark markets venezuela urls for darknet markets
ссылка мега mega onion shop
darknet market list links deep web shopping site
dark web drugs nz dma drug
darknet union versus darknet market
мега онион сайт mega onion зеркало
dark web in spanish deep web cc shop
mega зеркало сылка на мегу
dark markets china dark web in spanish
link de hiden wiki dark web links 2022
dark web markets reddit 2022 darknet сайты список
ethereum darknet markets versus project link
what darknet markets sell fentanyl tor best websites
xanax darknet markets reddit darknet drugs guide
darknet black market tor marketplaces
deep web weed prices black market access
what darknet markets are available search darknet markets
dark markets serbia black market alternative
black market access deep website search engine
darknet market status asap market link
buy darknet market email address darkmarket
onion links credit card onion market url
best darknet marketplaces asap market
the dark web links 2022 darknet markets japan
darknet market reviews phenethylamine drugs
зеркало мега даркнет сайты магазин
dark markets slovenia darknet market fake id
darknet market carding deep net access
how to enter the black market online bohemia market
onion link search engine tor link search engine
darknet market that has ssn database buying things from darknet markets
darknet market stats mdm love drug
dark markets uruguay darknet markets norway 2022
магазин даркнет ссылка мега
black market bank account darknet market list 2022
bohemia market link blockchain darknet markets
underground black market website darknet market francais
step by step dark web top dark net markets
darknet buy drugs darknet market features
tma drug site darknet liste
dark market 2022 darknet market url list
darknet steroid markets dark markets chile
dark markets singapore dark markets malaysia
dark web drug marketplace how to access the dark web on pc
мега магазин сайты даркнет
what darknet markets are live darknet markets
mega onion зеркала mega зеркало
xanax darknet reddit red ferrari pills
adresse dark web buy ssn dob with bitcoin
tor marketplaces dark web markets reddit
superman pills mg dark web counterfeit money
onion directory darknet market onion links
archetyp market url xanax darknet markets reddit
мега шишки магазины даркнета
darknet market dmt phenethylamine drugs
dark web drugs ireland darknet markets list reddit
dark net market list reddit unicorn pill
dark markets bulgaria how to get to darknet market safe
магазин мега mega онион сайт
сайты даркнет ссылки ьупф ьфклуе
naked lady ecstasy pill drug website dark web
darknet websites how to create a darknet market
alphabay link darknet market noobs
onion seiten how to access the dark web through tor
даркнет магазин мега купить
darknet market reviews darknet market wiki
working dark web links dark markets colombia
mega магазин новое зеркало мега
underground hackers black market best darknet drug sites
australian darknet markets darknet market 2022 reddit
deep web updated links how to use darknet markets
black market sites 2022 agora darknet market
deep web software market dark markets malaysia
best lsd darknet market counterfeit money onion
darknet market sites outlaw darknet market url
underground hackers black market site darknet onion
dark web hitman cvv black market
gbl drug wiki tor markets 2022
dumps shop deep web search engines 2022
drugs on the dark web darknet union
darknet wiki link deep web search engines 2022
which darknet market are still up reddit working darknet markets
мега даркнет сайт даркнет
dark web search engines 2022 tor markets 2022
tor top websites onion seiten 2022
dark markets uruguay dark web cheap electronics
darknet markets with tobacco list of darknet drug markets
updated darknet market links 2022 dark web markets reddit
Cocorico Market link darknet markets urls
dark web drugs australia tor darknet sites
reddit darknet markets 2022 dma drug
darknet market adderall prices alphabay market url
dark web trading darknet market carding
сайты даркнет ссылка на мегу
blackweb darknet market bitcoin dark web
buying drugs on darknet where to find darknet market links redit
how to get on the dark web black market website
cypher market dark market list
live onion darknet drugs
reliable darknet markets darknet market noobs reddit
darknet marketplace drugs red ferrari pills
darknet markets noob buying things from darknet markets
mega darknet darknet магазин зелья
working darknet markets 2022 tor dark web
мега мефедрон darknet магазин
how to anonymously use darknet markets black market websites 2022
how to buy bitcoin for the dark web darknet market alternatives
dark markets uruguay reddit biggest darknet market place
best darknet drug market 2022 darknet markets noob
dark web sites tor top websites
магазин мега мега сайт ссылка
grey market darknet bohemia darknet market
dark web sales dark web counterfeit money
duckduckgo dark web search darknet markets japan
dark markets finland darknet market listing
cannahome market darknet cannazone
mega онион сайт даркнет сайты магазин
darkfox url dark web website links
hidden financial services deep web darknet black market url
мега купить соль мега onion зеркало
what darknet markets are live deep web links updated
darknet market prices counterfeit money deep web
darknet магазин сайт даркнет
google black market darknet market superlist
darknet market noobs bible Heineken Express link
how to access the dark web reddit darknet online drugs
dark web markets 2022 australia tor darknet market address
how to enter the black market online Cocorico Market
официальный сайт мега mega ссылка
dark markets usa best darknet market links
onion seiten 2022 versus project darknet market
drugs on the darknet reddit best darknet markets
berlin telegram group drugs Kingdom Market link
dark markets uk largest darknet market
dark web sites underground hackers black market
ordering drugs on dark web best dark web marketplaces 2022
how to browse the dark web reddit dark markets mexico
how to get on the dark web on laptop uncensored deep web
сайт мега mega онион
ketamine darknet market darknet market stats
most popular darknet market darknet markets working links
tor markets links darknet list
cypher url dark markets monaco
darknet market and monero darknet market thc oil
asap link buy real money
darknet seiten darknet search engine url
darkmarket link darknet drug prices
darknet drugs sites deep web drug prices
top darknet market now buy ssn dob with bitcoin
onion directory list dark markets indonesia
mega market мега онион
archetyp market url list of dark net markets
drugs from darknet markets step by step dark web
fake id onion dark web sites name list
most popular darknet market versus link
darkfox market darknet online drug market
top dark net markets versus market
black market reddit darknet links 2022 drugs
darknetlive dark web market reviews
мега официальный сайт mega сайт
mega onion mega магазин
the darknet drugs darknet market lightning network
which darknet markets are up cypher market link
dark web live which darknet markets are up
deep web drugs reddit alphabay market
dark web cvv darknet sites
darkfox url working dark web links
официальный сайт мега зайти на мегу
dark markets finland darknet market list url
uncensored hidden wiki link darknet drugs india
dark web links market darknet links markets
brick market Kingdom url
Wow, amazing blog format! How long have you been blogging for?
you make running a blog look easy. The total glance of your web site is
great, let alone the content material!
мега купить соль официальный сайт мега
darknet seiten dream market reddit darknet market superlist
darknet market noobs reddit deep web drug url
darknet market alaska alphabay link reddit
как зайти на мегу мега даркнет
darknet markets still open darknet market stats
best darknet market 2022 darknet database market
мега скорость официальный сайт мега
dark markets indonesia tor best websites
darknet link drugs how to access the darknet market
darknet market lightning network dark markets singapore
verified darknet market deep web search engines 2022
мега кокаин mega сайт
dark web trading alphabay url
underground dumps shop black market online
brucelean darknet market archetyp market url
dark markets indonesia deep web addresses onion
dark web market links deep web addresses onion
outlaw darknet market url onion market url
darkfox market link deep web software market
cypher link accessing darknet market
how to dark web reddit darknet market noobs step by step
black market sites 2022 black market website names
dark markets san marino dark web buy bitcoin
зайти на мегу сайт даркнет
darknet market onions darknet market stats
dark web hitman for hire how to buy bitcoin and use on dark web
darknet adressen darknet xanax
cannahome market darknet vice city market url
dbol steroid pills how to enter the black market online
dark markets malaysia 2022 darknet markets
darknet market directory darknet markets may 2022
dark web vendors the best onion sites
darknet market drug prices darknet best drugs
зеркало мега mega даркнет
dark web links market counterfeit euro deep web
dark markets bosnia darknet selling drugs
archetyp market link tor market nz
deep web link 2022 reliable darknet markets reddit
buying things from darknet markets how to access darknet market
reddit best darknet markets Cocorico darknet Market
how to access the dark web 2022 dark web uk
popular dark websites tor market list
tor link list 2022 alphabay market darknet
mega onion mega даркнет
weed darknet market onion websites for credit cards
darknet markets may 2022 deep dark web
drugs dark web reddit buying drugs off darknet
darknet market sites dark web in spanish
Kingdom link cannazon
mega даркнет ьупф ьфклуе
how to access the darknet market black market drugs guns
dark markets ireland dark web markets 2022
darknet market links reddit back market trustworthy
deep web search engine url drugs on darknet
deep web search engines 2022 alphabay market url darknet adresse
reddit darknet markets uk what are darknet drug markets
darknet drugs australia dark web illegal links
underground market place darknet which darknet markets are still open
tfmpp pills deep web drugs reddit
mega зеркало мега сайт ссылка
buying drugs on the darknet canazon
darkweb sites reddit darknet market place search
ссылки на даркнет mega onion shop
best dark web markets dream market darknet link
counterfeit money onion vice city link
darknet market sites free deep web links
dnm xanax adress darknet
hidden wiki tor onion urls directories darknet onion markets
buying credit cards on dark web darknetlive
onion live brick market
deep web links reddit dark markets chile
darknet market canada dark markets andorra
darknet drugs links dma drug
hidden wiki tor onion urls directories darknet markets still open
history of darknet markets most popular darknet market
dark web hitman for hire dn market
мега онион сайт mega onion оффициальный сайт
deep web drugs darknet link drugs
new darknet marketplaces dark markets chile
asap darknet market deep web cc sites
euroguns deep web onion sex shop
incognito market url dumps shop
dark web address list naked lady ecstasy pill
dark markets venezuela links the hidden wiki
сайты даркнет ссылки mega onion зеркала
darknet site cannazon link
phenazepam pills pyramid pill
Cocorico link darknet markets up
cannazon link how to buy from the darknet markets
top darknet markets 2022 dark markets romania
drugs from darknet markets drugs on darknet
darknet market alphabay darknet drugs guide
Abacus link dark markets luxembourg
incognito market darknet bohemia link
hitman for hire dark web versus project market link
vice city darknet market darknet links market
black market website names urls for darknet markets
ссылки на даркнет mega onion зеркала
archetyp market url dark markets malta
deep web markets darknet new market link
best darknet market now best dark web links
how to buy from darknet markets darknet market stats
darknet markets best darknet markets best
versus project link underground website to buy drugs
darknet магазин зелья мега ссылка
cannahome darknet market orange sunshine lsd
best darknet markets reddit darknet drugs sales
dark markets slovakia outlaw darknet market url
reddit darknet market links bitcoin market on darknet tor
onion live darknet drug prices uk
darknet drug links grey market drugs
where to find darknet market links redit deep net websites
dark net market list reddit darknet market reddit 2022
мега сайт ссылка новое зеркало мега
darknet market reddits dark web markets 2022
onion darknet market unicorn pill
marijuana dark web dark markets norway
мега мефедрон магазин даркнет
Heineken Express url dream market darknet
florida darknet markets asap url
deep web links 2022 darknet market dmt
darkfox market link darknet market alternatives
link darknet market versus darknet market
tor market url darknet illegal market
dark markets netherlands tma drug
pill with crown on it bitcoin black market
darknet markets best vice city darknet market
buying from darknet market with electrum darknet paypal accounts
darknet drugs india cypher darknet market
ьупф ьфклуе mega onion оффициальный сайт
irbesartan 300mg pill pepcid 20mg pills famotidine 20mg generic
new dark web links dark markets romania
darknet market noobs guide how to access dark net
darknet links market uncensored hidden wiki link
dark web electronics dark markets andorra
cannahome url deep web drug markets
Heineken Express darknet tor markets links
сылка на мегу mega onion
dark web markets 2022 australia dream market darknet url
tor market links site darknet fermГ©
deep web drugs what are darknet drug markets
buying on dark web dark markets czech republic
best darknet market for weed dark web drugs bitcoin
online black market uk darknet drugs price
how to install deep web darknet escrow markets
darknet markets best dark web website links
biggest darknet markets dark web drugs australia
how to access dark net escrow market darknet
buy bitcoin for dark web darknet website for drugs
new darknet market reddit dark web links 2022 reddit
best darknet gun market deep web links reddit 2022
best ed medication ed pill
mega даркнет ссылка на мегу
onion directory list best websites dark web
hire an assassin dark web ethereum darknet markets
drugs dark web how to search the dark web reddit
active darknet market urls alphabay link
archetyp market darknet deep market
darknet guide dark markets norge
ketamine darknet market new darknet market reddit
мега сайт ссылка зайти на мегу
archetyp market link top darknet markets list
current list of darknet markets darknet telegram group
versus project market darknet drug prices
new darknet markets deep net websites
black market dark web links dark markets paraguay
tramadol dark web currently darknet markets
crypto darknet drug shop darknet markets working links
мега onion сайт мега
сылка на мегу mega магазин
dark markets japan darknet seiten dream market
dnm xanax darknet drugs
darkfox market link outlaw market darknet
мега onion мега онион
alphabay darknet market darknet links market
bitcoin drugs market reddit best darknet markets
sichere darknet markets 2022 cannahome market
tor markets 2022 dark web market list
deep web sites tor darknet
darknet drugs dark web drug marketplace
deep web drug links dark market
dark web links deep dark web
dark web link deep web drug markets
darknet drug links darknet market links
dark web sites darknet drug store
tor market links dark markets
darkmarket 2022 darknet drug links
deep web sites deep web markets
deep web drug markets tor markets 2022
мега даркнет даркнет магазин
dark market list darknet market
dark markets 2022 deep web links
darkmarket url tor market
deep web drug links darkmarket
tor dark web darknet markets
мега наркотики мега магазин
darknet drugs darknet sites
tor darknet tor markets 2022
free dark web dark market list
darknet markets deep web markets
darkmarkets tor market links
deep web links dark web site
darkweb marketplace free dark web
dark web websites dark web drug marketplace
darknet websites dark market list
tor marketplace darknet marketplace
darkmarket 2022 dark market url
darknet market darknet drugs
onion market deep web drug store
mega onion оффициальный сайт сайт даркнет
how to get on dark web dark websites
dark web site tor marketplace
dark web drug marketplace blackweb official website
darknet links dark web sites links
tor markets darknet drugs
dark web websites drug markets dark web
dark websites dark web link
dark net dark market
dark websites darknet drug market
как зайти на мегу официальный сайт мега
darknet market links deep web drug url
даркнет магазин ссылка мега
best darknet markets dark market link
darknet websites darknet drug store
darkmarkets dark markets 2022
tor markets deep web drug links
dark websites deep web drug store
даркнет магазин зайти на мегу
dark market list darknet search engine
tor market dark web websites
how to get on dark web deep web markets
black internet darknet market lists
tor dark web onion market
dark web market links black internet
dark market onion dark market 2022
darkmarket url deep web drug markets
dark websites dark market url
darknet market lists tor market url
deep web drug links darknet market lists
deep web sites blackweb official website
dark market darknet links
Hi there Dear, are you really visiting this website daily,
if so then you will definitely take fastidious knowledge.
onion market darknet drug market
how to access dark web darkweb marketplace
ьупф ьфклуе мега onion зеркало
dark internet darknet market
dark web links darknet marketplace
darknet websites drug markets onion
free dark web deep web links
мега онион мега зеркало
dark market tor market url
tor marketplace darknet search engine
dark market 2022 dark websites
deep web links tor markets links
tor market dark market list
dark web links tor market url
darknet market list tor market
darknet markets darknet market links
onion market tor market url
dark market list dark market onion
dark web link black internet
deep web markets tor market
best darknet markets blackweb
dark web link dark web websites
blackweb tor market
dark web search engine deep web links
mega darknet магазин даркнет
tor darknet dark market link
dark web websites dark net
darknet markets drug markets onion
мега onion сайты даркнет ссылки
deep dark web onion market
darkmarket link deep dark web
tor darknet darkmarket list
мега шишки магазин даркнет
dark markets 2022 darknet links
mega даркнет мега наркотики
darknet search engine best darknet markets
deep web links dark web link
how to access dark web tor darknet
deep web sites dark web market links
dark market onion the dark internet
dark web link deep web sites
darknet drug store free dark web
onion market dark web access
ссылка на мегу даркнет ссылки
mega зеркало сылка на мегу
dark web access dark website
dark net deep dark web
dark internet darknet websites
darknet marketplace best darknet markets
tor market links drug markets dark web
tor market links darknet search engine
dark web markets deep web markets
deep web drug store dark web link
darknet seiten deep web markets
dark web websites dark web markets
dark market onion dark market url
darknet market list darkmarket url
tor darknet dark market url
мега зеркало mega market
dark web market darknet marketplace
drug markets onion darknet drug store
dark web market dark web link
даркнет сайты магазин mega onion ссылка
darknet links the dark internet
darknet sites deep web drug links
darknet search engine darknet links
black internet how to get on dark web
dark net darknet markets
darkmarket darkmarket 2022
bitcoin dark web deep web drug markets
darknet drug market dark market link
darknet market links deep web drug links
how to access dark web dark market onion
dark web drug marketplace darknet drug store
darknet links dark web market links
mega onion зеркало мега onion магазин
best darknet markets darknet drug market
dark web market how to access dark web
dark web markets darkweb marketplace
даркнет магазин мега onion оффициальный сайт
dark web links dark web search engines
dark web search engine darknet marketplace
dark net dark net
tor marketplace dark markets 2022
deep web links deep web drug markets
сайты даркнет ссылки mega онион сайт
darkmarket dark markets 2022
darknet links darknet sites
darknet sites darknet market links
мега onion зеркала ссылка на мегу
darknet drugs black internet
blackweb darknet drugs
darknet drug links dark markets
how to get on dark web dark market
darknet drug store darknet seiten
dark web websites tor markets 2022
dark web market darknet drug market
mega onion оффициальный сайт мега шишки
мега шишки зеркало мега
dark market url blackweb official website
tor darknet dark web sites links
the dark internet bitcoin dark web
tor dark web how to access dark web
darknet drug store dark web drug marketplace
dark internet deep web links
darknet seiten dark web market links
dark web drug marketplace dark markets 2022
dark web sites links dark web access
deep web drug url deep web drug store
darknet seiten darkmarket link
prograf for sale order trandate 100mg online cheap order generic tricor 160mg
tor marketplace bitcoin dark web
darkmarket 2022 dark market url
dark web search engines dark web markets
мега купить соль мега даркнет
bitcoin dark web tor market url
deep web sites darkmarket url
ссылка мега мэги сайт
darknet drugs how to get on dark web
dark web links dark web links
darkweb marketplace deep web drug store
dark web links darknet market list
darkmarket list dark market
dark web links dark market link
мега наркотики мега зеркало
dark web drug marketplace darknet drugs
darknet websites darknet sites
tor marketplace dark website
deep web drug links tor dark web
dark web search engine dark web search engines
darknet drugs darknet markets
best darknet markets darknet drug links
darknet sites blackweb official website
onion market darknet search engine
новое зеркало мега новое зеркало мега
bitcoin dark web darknet site
darknet drugs dark market link
drug markets dark web bitcoin dark web
darknet market darknet sites
tor markets links blackweb official website
сылка на мегу мега наркотики
darknet markets darknet markets
dark web search engines tor markets 2022
darknet links dark web drug marketplace
mega онион сайт магазин даркнет
how to access dark web dark web sites links
darknet market list dark web market
how to access dark web best darknet markets
black internet dark market
how to access dark web dark net
dark website tor markets links
tor marketplace tor marketplace
мега onion зеркало сайт мега
dark market list dark web drug marketplace
mega зеркало даркнет сайты магазин
tor markets how to access dark web
dark market onion deep web drug store
dark market url deep web drug store
deep web markets dark web site
deep web drug url dark website
darknet seiten dark web market
darknet marketplace bitcoin dark web
tor market blackweb
darknet drugs darknet market lists
drug markets dark web dark web site
dark web access dark web site
darkmarket 2022 dark web access
deep web search dark web sites links
deep web links tor markets links
darknet market darkmarkets
deep web search black internet
darknet websites deep web sites
мега скорость mega onion оффициальный сайт
мега купить даркнет сайты магазин
darknet site drug markets onion
dark market url tor market links
dark web link deep dark web
даркнет ссылки мэги сайт
free dark web best darknet markets
dark web sites links darkmarkets
deep web drug markets darkmarket link
how to access dark web free dark web
deep web drug markets darknet market lists
darkmarket free dark web
deep web drug url darknet markets
deep dark web darknet market
darkweb marketplace dark web drug marketplace
мега даркнет мега скорость
dark internet darknet drug store
tor market dark market
darknet links darkmarkets
darknet drug store darkmarkets
dark web websites dark websites
магазин даркнет как зайти на мегу
dark web access tor marketplace
dark net dark website
dark market list dark web markets
darknet market lists darknet market
dark market 2022 tor dark web
сайт мега сайт даркнет
drug markets onion tor market url
how to get on dark web dark web search engine
dark web search engines deep web drug url
deep web drug url dark market onion
blackweb official website dark internet
dark market list darknet market list
darkmarket list the dark internet
ňĺŕňđ stromectol lice fda approval pachnacy how to treat stromectol
rash side effects stromectol 6 mg – stromectol apteka [url=http://stromectoles.com/#]stromectol 12mg
pills[/url] ferre doctor prescribed stromectol
darknet drugs dark market link
dark market onion dark web site
мега вход мега купить соль
мега кокаин mega onion зеркало
how to access dark web tor darknet
dark web markets dark internet
darknet drug store best darknet markets
dark web market links deep web drug markets
deep web drug markets blackweb
tor dark web darknet drug links
dark market list darkmarket list
deep web markets tor markets links
dark web search engines tor dark web
deep web sites deep web drug links
dark web markets blackweb official website
darknet drug store deep dark web
darknet market links dark web market links
blackweb official website deep web drug url
darknet market links blackweb official website
bitcoin dark web tor markets
зеркало мега сайт даркнет
dark web market darknet market links
dark web sites links dark web site
мега ссылка мега даркнет
сайт даркнет мега мефедрон
dark internet dark web websites
darknet markets dark web sites
deep web drug links darknet seiten
darknet seiten dark internet
deep web drug markets how to get on dark web
dark web sites links tor marketplace
free dark web how to access dark web
black internet dark market link
darknet seiten deep web drug links
darknet drug store dark web sites
deep web links darknet market lists
ьупф ьфклуе мега магазин
deep dark web deep web sites
мега официальный сайт мега onion зеркала
dark web search engine tor marketplace
darknet market lists darknet search engine
drug markets onion darknet drugs
deep web links dark market
darknet site drug markets onion
darknet market list darknet markets
deep dark web black internet
dark market 2022 darknet sites
darkmarket url darknet sites
мега шишки mega сайт
how to access dark web dark websites
darkmarket link darkmarket url
tor markets links deep dark web
darkmarket url black internet
tor markets links tor darknet
tor markets deep web drug store
новое зеркало мега мега сайт ссылка
ссылка мега магазин мега
darkmarket dark web sites
tor markets deep web drug markets
darknet sites deep web drug url
dark market list darknet market lists
onion market dark website
darknet websites darkweb marketplace
darknet sites deep web sites
darknet site free dark web
dark web search engine darkmarket
dark market 2022 how to access dark web
darknet seiten dark web markets
darknet магазин зелья магазин мега
drug markets dark web dark web websites
darkweb marketplace dark website
tor markets 2022 tor dark web
dark web access tor markets links
tor market links deep web links
the dark internet dark market onion
mega onion зеркала mega onion
darknet магазин мега нарко
bitcoin dark web drug markets onion
dark markets dark markets
deep web sites darknet search engine
dark web access darknet seiten
tor markets 2022 the dark internet
dark internet dark net
dark web market darknet seiten
darknet sites darkmarket url
darknet site dark web market list
darknet market links dark web site
deep dark web dark market link
best darknet markets darkweb marketplace
мега onion оффициальный сайт mega онион сайт
dark market onion best darknet markets
tor dark web dark market
mega market мега onion
dark markets 2022 darkmarket url
buy cheap generic zithromax buy amoxicillin online without prescription
dark market onion deep web drug markets
darkmarket 2022 deep web drug markets
tor markets 2022 darknet seiten
dark web search engines darknet market links
darkmarket list dark markets
dark web market darknet markets
darknet drug store darknet market links
mega onion зеркала ьупф ьфклуе
darknet market links darknet site
dark web market list drug markets dark web
tor market darknet market lists
darknet markets bitcoin dark web
free dark web dark web site
blackweb official website tor dark web
mega market darknet магазин
dark web access deep web links
mega market мега зеркало
dark markets deep web drug url
deep web drug markets tor marketplace
dark web site how to get on dark web
free dark web darkmarket 2022
darknet links tor darknet
deep web sites darknet search engine
darkmarket list dark market list
deep web sites dark web sites links
dark web markets darknet markets
mega darknet мега сайт
dark web links darkmarket 2022
blackweb darkmarket url
tor dark web deep web drug url
dark web markets darknet drug market
tor markets 2022 tor markets
dark web link blackweb official website
dark web site darkmarket url
мега onion магазин mega онион
mega onion зеркало даркнет ссылки
darknet market list deep web drug url
tor markets darknet marketplace
dark web market list darkmarket url
darkmarket dark web link
tor markets links tor markets
dark web market links how to get on dark web
dark web link deep web search
dark web markets deep web links
darkweb marketplace deep web search
darkmarket link deep web sites
dark web link dark web site
mega зеркало даркнет сайты магазин
dark net tor market url
darknet markets darknet sites
deep dark web deep web drug markets
мега onion магазин mega darknet
deep web markets deep web drug links
darkmarket list deep dark web
darknet seiten darknet drug market
deep web drug markets drug markets dark web
deep dark web dark web search engines
darknet marketplace dark market url
deep web markets dark web sites
black internet deep web markets
buy colchicine pills plavix 150mg ca generic plavix
сайты даркнет ссылки мега кокаин
dark web link darknet drug market
darknet site dark web link
darknet seiten blackweb
blackweb official website darknet market list
how to get on dark web tor market
dark internet dark net
новое зеркало мега mega darknet
dark market url darknet marketplace
dark web market darkmarket url
сайт даркнет mega онион
drug markets onion dark market url
darknet sites darknet drug store
tor markets dark markets
darknet drugs dark web websites
deep web markets dark internet
мега нарко мега купить
tor dark web dark web site
dark web websites dark market
darknet sites deep web markets
tor markets darknet links
dark web market tor marketplace
tor market darknet market
dark net tor darknet
dark web market links darknet links
blackweb dark web links
mega онион сайт мега наркотики
мэги сайт мега зеркало
Hi! I could have sworn I’ve visited your blog before but after looking at many of the posts I realized it’s new
to me. Anyhow, I’m certainly delighted I came across it
and I’ll be bookmarking it and checking back regularly!
onion market darkweb marketplace
dark web websites tor darknet
darknet drug store dark market 2022
deep web drug url blackweb official website
dark web websites dark market url
dark web search engines dark market
onion market deep web sites
tor markets links deep dark web
dark web market darknet seiten
darknet drugs dark web markets
dark web sites links dark web site
darknet seiten dark web search engines
blackweb official website deep web drug url
mega зеркало мега onion ссылка
dark web drug marketplace deep web drug url
how to access dark web darknet links
deep web drug links dark net
dark web websites blackweb
mega onion сайт даркнет
tor markets 2022 deep web drug store
tor markets deep web drug markets
darknet marketplace deep web drug markets
drug markets onion dark web sites links
deep web sites darknet market lists
tor markets links darknet markets
мега скорость мега onion оффициальный сайт
darknet seiten darknet sites
darknet links darkweb marketplace
darknet market list dark markets
darknet links darknet site
мега купить соль mega зеркало
tor markets dark website
dark web websites onion market
tor marketplace deep web drug markets
даркнет сайты магазин mega onion
зайти на мегу mega onion зеркала
dark markets dark web market list
deep web drug store deep web drug url
darknet market lists dark market link
dark web links how to get on dark web
darknet drug store dark markets
darknet market list deep web links
dark web websites tor markets links
how to get on dark web tor darknet
dark net dark web link
darkmarket 2022 darknet market lists
onion market dark web site
darknet drug store darknet market lists
tor markets 2022 dark web drug marketplace
dark markets 2022 dark web market links
dark web markets tor markets
мега магазин ссылка на мегу
даркнет ссылки мега мефедрон
darknet sites deep web drug markets
darkmarket url darkmarket
tor darknet drug markets onion
tor marketplace onion market
drug markets dark web darknet market list
dark market list best darknet markets
dark market 2022 darknet drugs
drug markets dark web darknet drugs
darkweb marketplace darknet seiten
tor market deep web drug markets
deep web markets dark market list
ьупф ьфклуе мега мефедрон
deep dark web darknet site
darknet marketplace best darknet markets
dark web access dark web site
darkmarket black internet
deep web search darkmarket list
blackweb onion market
мега купить соль mega darkmarket
darknet market lists blackweb
dark website tor darknet
dark web sites links tor darknet
deep dark web dark website
the dark internet blackweb official website
darknet market links bitcoin dark web
dark market link darknet market lists
магазины даркнета мега купить
dark web market list dark web market
darknet websites onion market
dark web link darknet websites
onion market darkmarket
deep web drug url darknet search engine
мега наркотики мега onion оффициальный сайт
мега onion магазин сайты даркнет
darknet marketplace tor market url
tor markets darknet sites
мега купить соль mega darknet
darknet drug market darknet websites
tor market tor markets links
dark market 2022 dark markets
dark web search engine dark market 2022
darknet market links deep web drug links
darkmarket 2022 dark web search engines
how to access dark web tor market links
darknet market deep web drug links
darknet market list tor marketplace
darknet drug store the dark internet
dark web market links darknet drug market
deep web drug markets tor market links
darknet market links tor markets
darknet drugs deep web sites
mega onion оффициальный сайт мега онион сайт
магазин даркнет мега даркнет
dark web search engine darknet drug links
dark website tor market
darknet links dark market 2022
dark markets 2022 dark web market list
darknet drugs tor dark web
black internet darkweb marketplace
blackweb darkmarket 2022
darknet markets darkmarket link
dark market blackweb official website
tor markets darknet drug market
мега кокаин магазин мега
how to get on dark web tor markets
dark market link darknet site
free dark web deep web markets
dark markets 2022 tor market url
dark internet tor markets
blackweb tor darknet
сайты даркнет ссылки мега шишки
dark web link darknet markets
tor markets dark web drug marketplace
darknet market links dark web sites
dark web search engines dark web link
darknet market list dark net
dark web sites links dark web link
darknet drugs dark web sites
darknet marketplace darknet links
мега onion зеркала мега наркотики
how to access dark web dark web market list
мега скорость mega онион
dark market blackweb official website
dark web links dark web link
dark web websites dark internet
deep web markets darknet markets
мега зеркало ьупф ьфклуе
darknet site deep web search
мега onion зеркала mega зеркало
deep web drug store darknet marketplace
deep web drug store dark internet
tor darknet dark web market links
darknet market lists tor market
dark market link darkweb marketplace
darkweb marketplace deep web drug url
dark web search engines tor markets
darknet websites darkmarket link
drug markets dark web drug markets onion
darknet market links darknet site
tor marketplace darknet search engine
сылка на мегу зеркало мега
ьупф ьфклуе мега ссылка
dark web links darknet drug links
darknet markets bitcoin dark web
drug markets onion tor market url
dark market url darknet site
darknet websites dark market onion
darkmarkets darknet websites
сайт мега мега onion ссылка
dark web markets dark web site
darkweb marketplace dark web drug marketplace
deep web markets dark market url
deep web drug links darknet seiten
darknet marketplace darknet market lists
dark web access darknet market links
tor dark web deep dark web
tor market links dark market 2022
drug markets onion dark markets 2022
darknet drug store deep dark web
dark market url how to access dark web
free dark web darkmarket list
darknet drug store tor markets
deep web search dark markets 2022
how to get on dark web dark web sites links
мега сайт ссылка мега шишки
blackweb dark markets
tor markets links drug markets onion
the dark internet darkmarket 2022
deep web sites dark market link
darknet marketplace dark web links
mega зеркало mega onion ссылка
dark website darknet drug links
сайты даркнет мега официальный сайт
deep web drug links dark markets 2022
tor markets 2022 darknet sites
deep web drug markets deep web drug store
tor markets dark web sites
dark web markets dark market link
dark net darknet drug store
мега кокаин ссылка на мегу
darknet seiten dark market 2022
dark internet dark web drug marketplace
drug markets onion dark market list
drug markets onion darknet seiten
мега официальный сайт мега нарко
dark web search engine dark web market links
darkmarkets dark net
dark web link how to get on dark web
drug markets onion dark web access
darkmarket 2022 deep web markets
deep web sites tor darknet
deep web sites free dark web
blackweb official website blackweb
darknet market lists dark net
onion market darknet drug links
мега onion зеркало мега скорость
darknet сайт сайт даркнет
dark web markets darknet sites
darkmarket list tor markets
dark web market links tor market url
dark market url deep web drug url
how to get on dark web deep web drug url
dark website darkweb marketplace
сайт даркнет mega онион
the dark internet tor market links
tor market links dark market list
darknet marketplace dark web sites links
dark web market best darknet markets
dark market 2022 dark web sites links
dark market url dark market link
tor dark web deep web drug markets
dark web access dark website
dark web site best darknet markets
darknet market blackweb
dark website best darknet markets
dark net deep dark web
dark market url dark web link
black internet dark web websites
tor market links dark web access
dark web sites dark market list
onion market darknet market list
darknet market black internet
darknet сайт мега мефедрон
onion market free dark web
tor marketplace deep web search
даркнет сайты магазин даркнет сайты магазин
best darknet markets darkmarket 2022
darknet search engine dark market 2022
dark web access black internet
black internet darknet links
darknet магазин зелья mega onion shop
how to get on dark web dark market 2022
dark web access dark web market links
black internet onion market
dark web market links deep web markets
deep web drug links deep web drug links
dark market url darknet markets
mega onion зеркало mega ссылка
darknet market list darknet sites
dark web market list darknet seiten
dark web link darknet websites
tor market bitcoin dark web
мега onion оффициальный сайт ссылка мега
darkmarket tor market
darkmarkets darknet market links
darknet market links deep dark web
darkmarket 2022 drug markets dark web
dark markets dark markets
tor markets links darkweb marketplace
darknet market links darkmarket 2022
darknet seiten tor marketplace
darknet drug links dark web markets
dark market link darknet marketplace
mega darkmarket сылка на мегу
мега onion магазин магазин даркнет
darknet drug market tor darknet
tor marketplace drug markets onion
dark websites darknet drugs
dark web drug marketplace tor marketplace
как зайти на мегу зайти на мегу
deep web drug url drug markets onion
free dark web dark web sites
deep web markets dark web access
dark web link dark market link
darkmarket 2022 tor market
how to get on dark web dark websites
ramipril 5mg over the counter purchase coreg online cheap order generic coreg 25mg
dark web market links dark web sites
darknet websites dark web site
tor market darkmarket
deep dark web darkmarket 2022
blackweb tor market url
darknet links darkmarket url
darknet markets deep web drug markets
deep web sites tor marketplace
mega ссылка мега onion
tor market dark markets 2022
dark market the dark internet
dark website dark web market
mega onion shop мега официальный сайт
tor dark web dark web markets
dark web sites darknet drug market
dark web market dark market 2022
dark web access dark web drug marketplace
darkmarket url tor market links
dark website dark web websites
dark websites blackweb official website
tor marketplace tor marketplace
mega onion shop мега onion
dark web links dark web market list
tor marketplace dark web drug marketplace
darknet site tor dark web
blackweb dark web search engines
deep web drug links deep dark web
dark web market list dark market
магазины даркнета darknet магазин зелья
darknet links darkweb marketplace
tor market links darkmarket url
deep web drug url dark web sites links
deep web drug store the dark internet
dark market link darknet markets
зайти на мегу мега сайт
darkmarket list deep web search
dark web link darknet sites
darknet seiten deep web search
darkmarket url darknet links
drug markets dark web deep web markets
dark web sites links darknet links
deep web drug links deep web search
darknet market links dark market
даркнет ссылки мега купить
мега официальный сайт мега наркотики
dark internet deep web drug store
best darknet markets darknet drug links
dark market onion deep web search
deep web sites dark web websites
darknet markets dark website
darknet seiten tor dark web
dark web search engines tor darknet
tor marketplace darknet links
tor market links darkmarket url
tor market url darknet drug links
tor markets links darknet market links
dark web search engines tor market url
darkmarkets dark web link
tor market links dark web sites
dark web market deep web drug links
darknet drug store dark web markets
dark web search engines dark market link
dark web search engine deep web markets
darkmarket list darknet drug market
dark web link darkmarket url
dark web drug marketplace deep web links
dark web access dark market url
dark web drug marketplace dark net
мега мефедрон даркнет сайты магазин
darknet market dark market link
darkmarket url free dark web
dark net dark web search engines
darkmarket link drug markets dark web
deep web sites darknet sites
darknet магазин зелья darknet магазин
dark web market blackweb
darknet market list darknet drugs
darknet market dark web site
dark web search engine darknet market lists
dark web search engines dark web websites
darkmarket 2022 tor markets links
даркнет ссылки сайт мега
deep web sites darknet market list
dark web search engine tor market links
dark market url dark markets 2022
darknet drug store dark web websites
darknet market list darknet seiten
drug markets dark web black internet
ьупф ьфклуе ссылка мега
deep dark web dark web sites links
free dark web dark market
dark web market links darkmarket list
dark website tor markets 2022
darknet drug market darkweb marketplace
tor market url deep web drug store
dark website blackweb
мега даркнет mega onion ссылка
ьупф ьфклуе mega market
darknet drug market darknet marketplace
darkmarket link darknet links
dark web search engines free dark web
dark website dark web site
darknet search engine tor market
blackweb official website darknet market
darknet market dark markets 2022
dark web access dark net
darkweb marketplace dark web websites
blackweb official website dark web search engine
dark web market list darknet websites
dark web access darknet websites
darkmarkets tor markets
drug markets onion tor markets links
dark web drug marketplace dark web links
dark market dark market list
darknet websites dark market
darknet drug store dark web sites links
the dark internet dark internet
darknet marketplace darknet market
deep web drug url tor marketplace
mega darknet mega даркнет
dark internet deep web links
dark web access darknet market
dark web websites darkmarket 2022
dark web market links deep web drug links
darkmarket darknet marketplace
dark internet dark web websites
мега мефедрон магазины даркнета
dark market onion dark websites
darknet sites dark web sites links
tor markets 2022 darknet drug links
darknet drug links darkmarket list
dark market link dark market
mega onion shop мега onion магазин
dark web market list dark web site
dark web market dark web search engine
tor dark web dark web market
dark web sites links dark market
tor darknet deep web sites
deep web drug url dark web market links
dark market url dark market 2022
mega онион сайт mega даркнет
bitcoin dark web onion market
dark web search engine darknet market list
darknet drugs dark markets
darknet drug market darknet site
darknet search engine dark web access
darknet seiten darkmarket
darknet drug market tor market links
blackweb official website deep web drug links
мега сайт ссылка мега нарко
сайты даркнет ссылки mega онион
darknet drug links dark internet
dark web markets darknet drug store
darknet search engine darknet market
darknet marketplace deep web markets
dark web market list dark net
deep web drug url best darknet markets
dark web drug marketplace drug markets dark web
onion market blackweb
tor markets 2022 dark websites
darknet markets dark web search engines
deep dark web darknet market
dark web site drug markets onion
blackweb official website darkmarkets
dark market darknet drug store
how to get on dark web darknet drug links
You really make it seem so easy with your presentation but
I find this topic to be actually something that I think I would never understand.
It seems too complex and extremely broad for me. I am looking forward for your next post, I
will try to get the hang of it!
tor market url tor markets links
darknet seiten darknet market lists
dark market list tor marketplace
darknet drug links how to get on dark web
deep web drug markets darkmarket
Thank you ever so for you blog post.Thanks Again.
mega онион mega onion
dark web markets darknet site
dark web links darknet drug store
dark web link deep web drug markets
Good article. I will be experiencing some of these issues as well..
tor market links dark web search engine
blackweb official website tor market links
darknet sites darknet markets
darkweb marketplace darkmarkets
mega магазин darknet магазин
dark web market list darknet marketplace
dark market list dark market onion
how to access dark web deep web search
darknet drug market the dark internet
dark web links deep web drug links
tor dark web deep web sites
black internet darknet market list
best darknet markets darknet marketplace
мега onion зеркала mega сайт
dark market blackweb
darknet market list dark websites
darknet markets darknet drugs
мега сайт магазин мега
darkmarket darkmarket url
dark website darknet site
darkweb marketplace darknet marketplace
black internet deep web drug store
onion market dark market
darkmarket tor markets links
darknet drug market tor markets links
tor market dark market 2022
tor darknet onion market
мега onion зеркало mega магазин
mega darknet мега нарко
onion market deep web links
darkmarket link dark web drug marketplace
dark web drug marketplace drug markets dark web
tor market drug markets dark web
dark market link darkmarket link
deep web sites dark web sites links
контакт подбор психолога Почему
Человек Меняется После Смерти
tor markets 2022 dark market url
dark markets 2022 dark web markets
darknet drug market dark web sites links
darknet links deep dark web
darknet market lists deep web drug store
black internet tor markets 2022
dark market onion darknet drug links
dark website dark market url
darknet search engine dark web market links
dark web sites darknet markets
darkmarket link blackweb
mega darkmarket ссылка мега
deep web drug links darknet links
darknet markets dark web market links
darknet market list deep web drug url
deep web sites darknet drug links
dark web search engines deep web drug links
darkmarkets dark net
deep web drug store free dark web
даркнет магазин мега сайт ссылка
dark web link deep web drug links
the dark internet best darknet markets
tor market dark web site
dark web market list dark market onion
darknet market links darknet market links
dark internet dark markets 2022
ьупф ьфклуе мега onion зеркала
darknet links darknet drug store
darknet sites black internet
drug markets dark web drug markets dark web
darknet sites darknet drug market
darknet магазин darknet магазин зелья
darknet market blackweb official website
Смотрите фильм Молодой человек Молодой Человек
black internet darknet drug links
dark web search engine darknet drug market
dark markets 2022 dark net
tor markets dark internet
darknet drug store dark markets
tor dark web drug markets dark web
Wonderful blog! I found it while searching on Yahoo News.
Do you have any tips on how to get listed in Yahoo News?
I’ve been trying for a while but I never seem to get there!
Many thanks
darknet sites darknet drug store
black internet tor marketplace
darknet магазин зелья мега онион сайт
ссылки на даркнет мега вход
deep web drug links darknet market list
tor market links how to access dark web
dark web site tor markets 2022
how to get on dark web dark market url
Быстрее пули бесплатно смотреть онлайн
Смотреть Быстрее Пули (2022) Онлайн В Хорошем HD 1080
Качестве
I truly love your blog.. Great colors & theme. Did you create this amazing site yourself?
Please reply back as I’m wanting to create my very own site and would love to learn where you got
this from or just what the theme is named. Appreciate it!
darknet site bitcoin dark web
dark websites dark market url
darknet seiten dark web market list
tor market dark web websites
darkmarket link deep web drug markets
deep dark web dark market link
tor marketplace dark markets
deep dark web tor darknet
darkmarket link dark internet
tor market url tor market links
darknet market dark market onion
dark market url darknet websites
darkmarkets dark market link
buy oxybutynin 2.5mg online buy amitriptyline sale furadantin 100 mg drug
darknet sites darknet market lists
даркнет ссылки мега онион
free dark web dark market onion
darknet market deep dark web
dark market link dark market link
darknet markets dark web markets
darknet drugs darkmarket list
darknet drugs tor market links
darknet магазин магазин даркнет
deep web drug url dark web websites
tor markets 2022 tor markets links
dark web sites links deep web sites
dark web links dark web market links
tor market url dark market list
зайти на мегу мега зеркало
deep web drug markets dark markets
dark web search engine drug markets onion
deep web drug links dark web access
darknet market darknet markets
dark web links dark web sites
dark web market list tor markets links
darkmarkets darknet seiten
даркнет ссылки мега вход
dark web site dark market link
deep web sites tor market links
deep web search dark web link
deep web drug markets dark web access
darkmarket url dark markets 2022
deep web search blackweb official website
tor marketplace darknet market lists
dark web sites links blackweb official website
Дом дракона Дом Дракона
мега onion ссылка мега onion
mega даркнет мега онион
dark web markets how to get on dark web
deep web links deep web drug store
dark websites dark market onion
dark web search engines blackweb official website
dark markets dark websites
dark market free dark web
tor market url darknet seiten
dark web drug marketplace black internet
darknet drugs tor market
dark web search engine deep web drug url
darkmarket link dark web websites
darknet search engine tor darknet
darknet links dark website
bitcoin dark web deep web drug links
onion market bitcoin dark web
free dark web deep web search
dark market url tor darknet
dark market 2022 darknet market list
deep web drug store tor markets
мега onion зеркало ссылки на даркнет
deep web drug links free dark web
drug markets dark web dark markets 2022
dark web access darkmarket
darkweb marketplace tor markets 2022
мега onion даркнет ссылки
blackweb official website deep web markets
tor markets darkmarket url
tor darknet dark market link
deep web sites dark market 2022
darknet markets dark web links
dark internet dark web sites
darknet market links tor darknet
tor dark web dark web market list
мега onion зеркала мега onion
tor market url deep web links
onion market tor market links
how to access dark web how to get on dark web
darknet marketplace dark web search engines
магазин мега зеркало мега
how to access dark web dark market
black internet best darknet markets
deep web drug url deep web links
dark website darkmarket link
darknet drugs dark web market list
darkmarket darkweb marketplace
how to access dark web blackweb official website
dark websites black internet
darknet drug links dark web sites links
мега официальный сайт мега скорость
магазин даркнет даркнет ссылки
dark market link dark web search engine
dark market dark market 2022
dark web links dark net
dark web websites dark internet
darknet site darkmarket url
bitcoin dark web tor markets 2022
deep web markets free dark web
darkmarket darknet markets
blackweb tor markets
darknet market lists tor marketplace
tor marketplace deep web search
сайты даркнет ссылки mega ссылка
dark web search engine darkmarket list
deep web links dark markets
tor markets links deep web drug store
blackweb official website dark web link
darknet market lists tor market url
darknet drugs darknet drug store
darkmarket link darknet sites
darkmarket list darknet websites
tor dark web dark web market list
dark web link bitcoin dark web
dark internet blackweb
мега сайт ссылка мега onion магазин
darknet market list dark web websites
dark websites dark web links
darknet seiten darkmarket list
how to get on dark web dark market list
darknet websites blackweb official website
mega сайт как зайти на мегу
dark web websites darknet market list
dark web access tor marketplace
tor market links tor markets links
darknet market links blackweb
dark market url darknet sites
darknet drug store deep web markets
drug markets dark web dark web markets
мега купить соль мега купить соль
darknet drug links dark web site
dark web access dark market list
tor market links tor dark web
dark web market links darknet site
dark web drug marketplace dark web market list
как зайти на мегу mega ссылка
dark market link tor markets 2022
darknet market links darkmarkets
dark web access darkmarket link
deep web markets darknet drug store
tor markets 2022 deep web sites
darkmarket 2022 dark websites
darknet drugs darknet market lists
darkweb marketplace dark markets
мега купить mega onion оффициальный сайт
deep web drug store dark markets
dark web market links drug markets dark web
сайты даркнет сайт мега
darknet site darknet drug market
tor markets dark web websites
darknet markets dark web search engines
официальный сайт мега darknet сайт
onion market darknet market
сайт мега darknet магазин
dark net darknet market lists
deep web markets dark market list
bitcoin dark web dark web search engines
dark market onion dark market
blackweb dark markets
tor market url darknet sites
deep web search dark web links
tor darknet deep web drug url
free dark web deep dark web
drug markets onion best darknet markets
dark market url darkmarket link
darknet drug store dark internet
tor marketplace deep web drug store
drug markets onion tor markets links
how to get on dark web darknet site
мега onion сылка на мегу
Hey, thanks for the blog. Really Cool.
dark market url bitcoin dark web
sildenafil tablets from india 100mg tablets sildenafil 100g
best darknet markets darkweb marketplace
dark internet darknet websites
the dark internet darknet site
мега мефедрон мега онион сайт
darkweb marketplace darknet market
onion market the dark internet
deep web drug url darknet market list
deep web sites deep web links
dark web markets darknet sites
darknet site darknet drugs
deep web search dark internet
darknet seiten dark internet
darkmarket link dark market
мега onion зеркало mega onion зеркала
deep web drug url tor markets 2022
darknet marketplace darkmarket link
deep web markets dark web drug marketplace
dark web sites links tor market
мега наркотики магазин мега
deep web drug markets the dark internet
tor market links darknet links
dark website dark markets 2022
blackweb free dark web
darknet links dark websites
dark website darknet search engine
how to access dark web darkmarkets
«Игра на выживание» Игра
На Выживание 2 Сезон (13 Серия)
deep web search blackweb
мэги сайт мега onion
onion market dark web access
мега шишки мэги сайт
мега онион зеркало мега
darknet drugs dark websites
darknet market links darknet marketplace
даркнет сайты магазин мега купить
dark web websites dark markets 2022
dark web links dark web links
deep web drug url blackweb
blackweb darknet market lists
darkmarkets dark market onion
Howdy! This is kind of off topic but I need some advice from an established blog.
Is it tough to set up your own blog? I’m not very techincal but I can figure things out pretty fast.
I’m thinking about setting up my own but I’m not sure
where to begin. Do you have any ideas or suggestions?
Cheers
deep web drug store deep web drug store
dark market link deep web links
tor darknet darknet site
dark market 2022 dark internet
deep web drug links darknet drug links
tor market darkmarket url
tor markets links dark web link
darknet marketplace free dark web
darknet links darknet sites
dark market list darknet market links
dark web markets deep web markets
darknet search engine drug markets dark web
dark markets 2022 free dark web
dark net dark web search engines
ссылка мега ссылка на мегу
dark market link onion market
dark market url dark market onion
free dark web darkmarket link
darknet магазин зелья мега наркотики
dark web market links deep web drug markets
darkmarkets dark web market list
dark websites tor markets links
tor market url dark market link
drug markets dark web darkweb marketplace
free dark web darknet site
deep dark web dark web search engine
how to get on dark web deep web drug links
dark websites dark market list
mega магазин darknet магазин
dark web sites darknet seiten
onion market dark web sites
tor marketplace dark market link
darknet market darknet drugs
мега onion оффициальный сайт darknet сайт
dark web search engine dark web site
dark websites dark web markets
dark market 2022 bitcoin dark web
dark web market list deep web links
darknet site darknet market lists
мега onion оффициальный сайт ссылки на даркнет
tor market best darknet markets
tor market tor markets
deep web links deep web search
мега сайт мега onion ссылка
ссылки на даркнет сайт даркнет
tor darknet dark web search engines
best darknet markets dark web market
darknet sites free dark web
мега onion магазин мега даркнет
deep dark web darknet search engine
dark web market links dark web market list
drug markets dark web black internet
darknet drug links tor markets 2022
darkmarket list drug markets dark web
dark market list darknet markets
darknet market list drug markets onion
dark market onion dark websites
dark web search engines darknet drug links
how to get on dark web dark web link
darknet markets dark web markets
dark market onion deep web drug url
darkmarket dark web access
bitcoin dark web dark market link
dark web search engines tor markets links
dark web search engine onion market
dark internet dark web market list
tor dark web bitcoin dark web
darknet seiten dark web search engine
зайти на мегу мега мефедрон
dark market list dark web search engines
how to access dark web tor markets links
darknet seiten dark market onion
deep web drug store tor dark web
odnoklassniki-film.store
ьупф ьфклуе сайт даркнет
darknet site free dark web
darknet drug links darknet drug market
deep web drug store darknet market
blackweb dark web market
how to get on dark web darknet market
darknet marketplace deep web drug markets
bitcoin dark web dark internet
dark web link dark web search engine
dark internet tor markets 2022
darknet sites darknet links
сайты даркнет ссылки мега онион
darknet markets drug markets dark web
deep web drug store darkweb marketplace
dark website darkmarkets
mega market мега кокаин
dark web websites best darknet markets
mega даркнет сылка на мегу
смотреть онлайн фильм Эра выживания в хорошем качестве бесплатно
Эра Выживания Смотреть Онлайн Бесплатно В Хорошем Качестве
Полный Фильм На Русском Языке Бесплатно
blackweb darkweb marketplace
dark web websites darkmarkets
onion market dark web link
darknet drug links darknet market
ibuprofen pills remeron 30mg oral calcitriol 0.25 mg pills
darknet market links darkmarket 2022
dark markets dark market url
darknet links dark market 2022
mega зеркало мега onion магазин
darknet drug links dark market 2022
магазины даркнета mega onion зеркало
darknet drug market dark web market links
даркнет сайты магазин как зайти на мегу
darknet sites dark web sites links
tor marketplace tor markets
blackweb how to get on dark web
free dark web dark web site
darknet drug store dark web links
darknet seiten dark web sites
darkmarket url tor marketplace
deep web markets darknet market lists
dark markets free dark web
dark web links drug markets onion
darknet drug market dark market list
bitcoin dark web dark web search engine
dark net tor markets links
deep web drug store tor darknet
tor market drug markets dark web
dark markets deep web drug markets
deep web drug url best darknet markets
how to get on dark web dark web site
dark market tor markets links
dark market url dark market url
mega onion shop сайты даркнет ссылки
darknet market lists dark web market links
darknet drugs dark web market links
dark web market list darkmarket url
dark net dark market onion
darknet drug store darkmarkets
dark market tor marketplace
мега зеркало mega сайт
deep web drug links best darknet markets
darknet links bitcoin dark web
dark market onion deep web markets
dark internet darknet site
dark web search engines darknet marketplace
tor market how to get on dark web
tor dark web dark web sites links
deep web sites darknet markets
сайт мега мега даркнет
dark web market best darknet markets
даркнет сайты магазин мега ссылка
dark web site blackweb
dark web market list deep web search
мега нарко ссылка на мегу
deep web markets dark web market links
dark net free dark web
drug markets dark web deep web links
dark market darknet drug links
darknet market darknet market
darknet market lists tor darknet
blackweb official website darknet search engine
dark web access blackweb
мега наркотики mega onion shop
onion market dark websites
мэги сайт сайт даркнет
tor markets dark web market
сайты даркнет ссылки мега скорость
dark markets darkmarket url
dark market list dark markets 2022
onion market dark web drug marketplace
dark web site black internet
dark web drug marketplace dark web market links
dark market link dark net
darkmarkets dark web links
dark market url dark market url
darknet market list the dark internet
dark internet drug markets onion
darknet marketplace darkweb marketplace
dark markets tor marketplace
dark web websites deep web drug links
dark web links tor markets
dark market 2022 tor market links
dark web market list deep web sites
dark market list dark web sites links
darknet links darknet marketplace
dark websites deep web search
dark web websites deep dark web
darknet search engine tor marketplace
I really love your site.. Great colors & theme. Did you make
this amazing site yourself? Please reply back as I’m attempting to create my very own site and would love
to know where you got this from or what the theme is named.
Appreciate it!
darknet магазин зелья мега ссылка
deep dark web tor market url
dark web links deep web drug markets
dark web drug marketplace tor markets 2022
dark markets 2022 darknet drugs
ссылки на даркнет mega ссылка
dark markets 2022 darknet search engine
dark web market links dark market onion
darknet marketplace tor darknet
tor market darkmarket list
tor dark web dark web sites links
Hello, yeah this piece of writing is really nice and I have
learned lot of things from it concerning blogging. thanks.
drug markets onion dark markets 2022
darknet market list dark web search engine
deep web drug url dark web websites
mega onion оффициальный сайт мега шишки
the dark internet black internet
сайт мега мега мефедрон
deep web search deep web drug markets
dark web markets dark internet
darknet search engine bitcoin dark web
darkmarket link darknet market lists
мега магазин мега шишки
darkmarkets tor marketplace
darknet sites dark market list
darkmarket list deep web drug markets
tor markets 2022 deep dark web
drug markets onion dark net
tor market deep web markets
ьупф ьфклуе mega darkmarket
drug markets onion darknet sites
darknet site darknet drug market
магазины даркнета мега зеркало
dark market onion darknet drug store
мега onion даркнет ссылки
darknet links deep web sites
dark market onion bitcoin dark web
darkmarket url deep web drug store
black internet darknet market list
dark web market links tor dark web
dark web websites tor markets links
darknet market lists dark websites
dark web websites deep web drug store
dark market deep web drug markets
how to get on dark web dark web market links
It’s an remarkable piece of writing in favor
of all the web people; they will get advantage from it I am sure.
darknet markets dark web market
deep web drug markets darknet sites
darknet market links tor market url
dark market list dark web market
tor market darknet marketplace
dark web drug marketplace darkmarket 2022
dark web search engines dark web sites links
darknet market links dark markets 2022
dark web sites dark web market links
mega onion shop ссылка мега
darkmarket darknet market list
the dark internet dark market 2022
dark web site darknet drug links
whoah this blog is great i love reading your articles. Keep up the good
work! You know, lots of people are hunting round for this info, you can aid them greatly.
darkmarket url darknet drugs
мега onion магазин mega даркнет
deep web markets dark web websites
tor darknet dark web market links
мега зеркало магазин мега
darkmarket link tor market url
dark web access dark web search engines
dark market link how to access dark web
tor markets 2022 tor darknet
darkmarket list deep web links
mega даркнет даркнет сайты магазин
blackweb official website darkmarket
как зайти на мегу зеркало мега
deep web search dark market link
dark web sites links deep web markets
dark net tor darknet
darkmarket 2022 dark markets 2022
dark web access dark web drug marketplace
ьупф ьфклуе магазины даркнета
tor markets 2022 drug markets onion
darknet market links tor market
darkmarket link dark market list
mega darkmarket ссылки на даркнет
darkmarket url dark market 2022
darknet drug market dark market link
darkmarket url darknet drugs
dark market list darknet market
dark web market links tor markets links
tor markets drug markets onion
darknet магазин ьупф ьфклуе
darknet drug links darknet market links
мэги сайт мэги сайт
dark web drug marketplace darknet marketplace
deep web links dark market
free dark web blackweb official website
best darknet markets dark net
darknet search engine dark web link
darknet market lists dark market onion
darknet websites dark markets 2022
black internet deep web drug url
tor markets 2022 dark markets
dark web links darknet markets
the dark internet darknet search engine
darknet search engine deep web markets
tor market blackweb official website
darknet markets deep web drug markets
dark internet dark web search engines
dark market 2022 darkmarket link
the dark internet tor market
dark web links dark website
tor marketplace tor marketplace
мега онион мега onion оффициальный сайт
dark market list tor markets
dark web market black internet
deep web sites drug markets dark web
dark web links dark web links
dark internet dark markets
мега шишки мега наркотики
mega darkmarket mega darknet
darkmarket list dark market 2022
dark web search engine tor markets links
darknet search engine deep web drug url
darkmarket dark web market links
blackweb darknet market
сайт даркнет сайт даркнет
tor marketplace deep web markets
tor market dark internet
deep web links darkmarkets
мега официальный сайт мега скорость
darknet drug market dark markets
how to get on dark web dark web link
dark website darkmarket url
darknet market list darknet search engine
мега мефедрон мега магазин
darkmarket how to get on dark web
dark market url dark web site
darknet seiten dark market 2022
dark markets 2022 dark web sites
мега вход мега магазин
darkweb marketplace dark web market links
darkmarkets drug markets onion
dark web drug marketplace deep web sites
deep web drug url darknet market lists
dark web link dark market 2022
сылка на мегу mega ссылка
darkmarket link darkmarket 2022
даркнет ссылки darknet сайт
darknet sites darkmarket url
dark web market links darkmarket 2022
the dark internet onion market
tor marketplace drug markets onion
darknet markets deep web drug markets
darknet drug market darkweb marketplace
darknet markets dark web link
drug markets dark web black internet
dark market blackweb official website
dark market darknet websites
drug markets dark web tor markets
dark websites dark market list
darkmarket url darknet market list
darkmarket list darkmarket 2022
dark market url deep web search
darknet markets deep web markets
darknet drug store dark web sites links
darknet market list deep dark web
dark web websites dark web site
сайт мега новое зеркало мега
deep web markets dark market url
tor market links deep web markets
best darknet markets darknet websites
darkmarket link bitcoin dark web
drug markets dark web dark market
мега наркотики мега кокаин
новое зеркало мега мега onion магазин
deep web sites darknet site
the dark internet dark web markets
darknet marketplace darkmarket list
best darknet markets best darknet markets
darknet markets darknet drug links
dark web drug marketplace dark market
мега вход мега даркнет
deep web drug url black internet
darkmarket url darknet market links
sildenafil mexico pharmacy sildenafil 110 mg capsule
darkmarket link darknet seiten
deep web sites dark market list
dark web search engine dark web sites
ссылки на даркнет магазин даркнет
bupropion over the counter buy zyban 150 mg pill sildenafil drug
darknet site dark markets 2022
мега магазин новое зеркало мега
deep web drug store deep web sites
darknet seiten how to access dark web
darknet market list tor darknet
dark market darkweb marketplace
darknet site darknet drugs
best darknet markets dark markets 2022
dark net dark market url
mega onion shop mega onion ссылка
free dark web deep web sites
deep web markets deep dark web
dark market dark market link
darknet market links tor market
darknet marketplace darknet drug market
black internet blackweb official website
darkweb marketplace darknet market list
deep web drug links dark web markets
darknet market lists tor dark web
dark market url deep web search
dark web link dark market 2022
dark market link darknet links
dark web drug marketplace darknet drugs
dark market onion blackweb
dark web links dark markets 2022
dark web market deep web drug url
dark market link dark markets
blackweb tor markets links
bitcoin dark web tor marketplace
darknet sites dark web market
mega зеркало мега онион
drug markets dark web tor darknet
darkmarket onion market
deep web drug links dark website
deep web sites onion market
даркнет ссылки сайт даркнет
darknet drug market darknet markets
mega зеркало мега даркнет
tor market links deep web drug url
dark market dark websites
tor marketplace darknet site
dark web market tor darknet
darknet links dark web market
мега onion оффициальный сайт мега onion ссылка
tor markets dark market onion
darkweb marketplace darknet links
ссылки на даркнет мега onion магазин
tor marketplace dark web access
darknet seiten tor markets links
deep web markets dark market 2022
mega ссылка мега кокаин
drug markets dark web darknet market lists
mega onion shop мега магазин
darknet sites darkmarkets
dark web drug marketplace darkmarket
dark market onion the dark internet
tor markets dark internet
best darknet markets dark web site
darknet drug market tor markets
cheap bupropion sildenafil mail order buy viagra online
blackweb official website dark web market links
free dark web darknet market list
mega onion mega darkmarket
как зайти на мегу мега onion магазин
darknet market tor darknet
dark web market links how to access dark web
dark market 2022 blackweb official website
tor markets tor marketplace
dark markets 2022 dark web websites
dark web sites dark markets 2022
tor markets black internet
darknet markets deep web markets
dark market list dark web link
darkmarket list tor darknet
dark web link darkmarkets
darknet market list dark web market
darknet market lists darknet market list
dark web links tor market
darknet marketplace dark market url
darknet market lists darkmarkets
tor dark web darkmarket link
darknet drugs deep web drug links
сайты даркнет mega даркнет
darknet seiten darkweb marketplace
tor dark web dark markets
tor dark web darkmarket 2022
mega onion shop сайт даркнет
best darknet markets black internet
мега onion официальный сайт мега
how to access dark web darknet sites
tor market links dark market link
dark web market blackweb
dark website dark web sites
tor markets darknet market list
deep web sites dark web market
dark web search engines tor darknet
darkmarket deep web links
сайты даркнет ссылки сайт даркнет
drug markets onion dark market url
мега шишки мега кокаин
best darknet markets tor marketplace
dark web sites darknet links
how to access dark web darknet marketplace
mega onion зеркала даркнет сайты магазин
dark web link darknet markets
mega onion зеркало mega даркнет
darknet search engine darkmarket list
deep web drug store dark market 2022
free dark web darkmarket url
deep web sites darkmarket url
dark web search engines bitcoin dark web
dark market list tor markets links
blackweb dark market 2022
мега даркнет ссылки на даркнет
black internet darknet drug market
мега onion зеркало mega market
dark websites deep web links
black internet tor markets 2022
darkweb marketplace darknet websites
dark web sites links dark market link
blackweb official website darknet marketplace
darknet links dark web market list
darknet market darknet site
darknet market darkweb marketplace
darknet site darknet sites
dark websites darkmarket link
deep web sites darknet seiten
dark web search engines darknet markets
darkweb marketplace darkmarket link
black internet dark market list
dark web search engines best darknet markets
darknet market lists darkmarket list
darknet links how to access dark web
deep web drug markets the dark internet
мега вход как зайти на мегу
darkmarket list darknet drug links
deep web sites dark web search engines
mega market мега онион
мега onion зеркало магазин даркнет
dark market darkmarkets
tor market url dark web links
darknet marketplace darknet drug market
tor darknet dark web search engine
deep web links darkmarket url
darkmarket list black internet
darkmarket deep web drug store
deep web drug store darknet links
официальный сайт мега mega онион
darknet marketplace darkmarket list
darknet drug links darknet seiten
мега ссылка мега сайт ссылка
darkmarket list black internet
the dark internet darknet drug links
dark market link drug markets onion
dark web sites dark market list
darknet seiten darknet drug links
mega darknet сайт мега
dark website dark market link
mega онион мега сайт ссылка
blackweb official website darknet drug market
black internet tor darknet
darknet marketplace darkmarkets
darkmarket url darknet market
darknet market lists dark market url
darknet links dark website
ссылки на даркнет mega онион сайт
мега мефедрон мега официальный сайт
dark internet tor darknet
darknet links darknet market list
darknet market dark web access
deep web drug links blackweb official website
darknet sites best darknet markets
tor darknet dark web websites
dark market 2022 dark web websites
dark markets tor markets 2022
darknet marketplace tor markets 2022
darknet market links dark web market
darkmarket url dark net
dark web link dark web sites
darkweb marketplace tor markets links
tor market dark market list
dark web link darknet market
free dark web dark market url
dark web search engine drug markets onion
how to get on dark web darknet market links
dark net bitcoin dark web
dark web websites darknet market lists
darknet drug market deep web drug store
сайты даркнет ссылки мэги сайт
магазин мега сайты даркнет ссылки
мега сайт ссылка мега onion
tor markets links tor markets 2022
tor darknet deep web links
dark web markets darkmarket
drug markets dark web darknet marketplace
darkmarket darkmarket
dark market list dark market list
darknet drug market best darknet markets
deep dark web dark market list
darkmarkets onion market
mega магазин mega onion оффициальный сайт
deep web drug markets deep web links
сайты даркнет сайты даркнет ссылки
onion market deep dark web
darknet drug links darkmarkets
dark web sites darknet market links
dark website dark web links
tor markets links how to get on dark web
dark web access dark web market list
магазины даркнета mega onion зеркало
dark net dark market onion
deep dark web deep web links
мега официальный сайт сайт мега
deep web markets tor darknet
tor markets 2022 dark web sites links
darknet marketplace darkmarkets
deep web drug markets darknet links
dark web drug marketplace blackweb
ссылка мега мега даркнет
мега нарко mega onion ссылка
dark net tor market url
black internet tor marketplace
dark internet dark web search engines
deep web links deep web drug store
blackweb official website black internet
deep web sites darknet market
deep web markets bitcoin dark web
darknet drug market drug markets onion
the dark internet darknet websites
tor markets links deep web markets
darknet market list dark market url
darkweb marketplace deep web drug links
tor markets links deep web links
darknet market list darknet market
darkweb marketplace dark web drug marketplace
darkmarkets dark web links
dark markets dark market link
dark website darknet market lists
dark market url darknet site
dark market onion dark web sites
darkmarket list dark web site
mega onion зеркало mega сайт
мега кокаин мега onion зеркала
onion market dark website
dark web market onion market
mega даркнет мега вход
Hey, I think your site might be having browser compatibility issues.
When I look at your website in Safari, it looks fine but when opening
in Internet Explorer, it has some overlapping. I just wanted to give you a quick heads up!
Other then that, wonderful blog!
how to access dark web dark web link
dark web links dark web websites
tor markets tor market links
how to get on dark web darkmarkets
dark web search engine darkmarket link
methotrexate 2.5mg ca purchase losartan pills losartan buy online
dark websites dark market
dark website dark market 2022
deep web search tor markets 2022
darknet магазин мега onion зеркала
dark web market list dark web market
dark market url dark web market
как зайти на мегу darknet сайт
dark market link darknet market links
dark websites tor market url
deep web drug url dark net
mega зеркало даркнет сайты магазин
dark web sites links darknet market links
darknet drug store dark web search engines
мега onion darknet магазин зелья
darknet site darknet websites
darknet seiten deep web drug markets
Hi, I think your blog might be having browser compatibility issues.
When I look at your blog site in Firefox, it looks
fine but when opening in Internet Explorer, it has some overlapping.
I just wanted to give you a quick heads up! Other then that,
fantastic blog!
darkmarket darknet sites
dark website darknet markets
deep web markets deep web sites
how to access dark web tor markets
deep web drug store dark web markets
ьупф ьфклуе сылка на мегу
мега мефедрон мега ссылка
dark market dark market 2022
dark market 2022 dark websites
deep web links tor marketplace
free dark web the dark internet
tor markets links dark web search engines
dark web market the dark internet
dark web drug marketplace tor market
darknet drugs tor markets links
deep web search darknet market list
darknet drugs dark internet
tor markets 2022 dark markets
darknet site drug markets dark web
darknet marketplace the dark internet
tor markets dark websites
dark web link darknet search engine
darknet site dark web site
how to get on dark web dark web markets
dark markets darkmarket list
darkmarket 2022 darknet drug store
мега купить соль mega сайт
мега шишки mega market
tor markets 2022 dark website
даркнет магазин mega darknet
dark market list dark internet
dark markets 2022 tor darknet
dark web market list darknet market
dark web site darknet seiten
darknet marketplace how to get on dark web
darknet markets deep web drug markets
deep web links darkweb marketplace
darkmarket link tor markets links
dark web sites links dark market link
deep web drug links dark web market list
магазины даркнета mega onion зеркало
dark web market links dark web search engine
ссылка мега mega onion ссылка
darkmarket deep web drug links
dark web search engines dark market onion
tor darknet deep web links
mega onion shop мега онион сайт
deep web markets dark market url
darkmarket link darknet site
mega даркнет мега магазин
darknet marketplace dark markets
dark web site deep web markets
darkmarket link dark market link
darknet sites tor markets links
tor markets links dark web drug marketplace
darkweb marketplace darknet drug market
deep web drug markets dark web markets
dark web access best darknet markets
mega market даркнет ссылки
tor market url darkmarket url
dark market link darknet search engine
зайти на мегу даркнет сайты магазин
darkmarket url best darknet markets
darknet drug store dark web link
dark market url deep web drug markets
tor dark web dark web market list
darknet market lists dark website
dark market link dark market url
bitcoin dark web darknet drugs
deep web links darknet drug store
dark websites darknet market links
dark markets 2022 tor markets 2022
deep web drug markets darknet sites
darknet site darknet site
dark net dark web link
mega даркнет мега onion ссылка
tor marketplace free dark web
dark websites dark web search engines
мега купить mega onion shop
darknet market lists how to access dark web
магазин даркнет mega даркнет
drug markets dark web darknet market list
deep web drug markets tor marketplace
dark web market links darknet sites
dark markets 2022 dark web search engines
darknet drugs dark market 2022
darkweb marketplace dark markets 2022
deep web drug url tor market links
how to access dark web darkmarkets
darkweb marketplace darkweb marketplace
сайты даркнет ссылки мега onion магазин
dark websites darknet market
мега сайт ссылка сайт даркнет
tor darknet darkmarket 2022
deep web drug url deep web links
deep web drug markets darknet drug store
darknet seiten darkmarket list
ьупф ьфклуе сылка на мегу
darknet links tor market
tor market tor market
deep web links dark web drug marketplace
darknet магазин мега скорость
clomid verses femara early menstration clomid can you use ovulation predictor kit clomid
dark websites dark markets 2022
best darknet markets dark web drug marketplace
darknet market links how to get on dark web
free dark web darknet websites
deep web drug links darkmarket url
black internet deep dark web
dark website darkmarket
мега сайт мега onion магазин
darknet sites the dark internet
darkmarket link free dark web
mega market мега купить
dark web websites darknet links
tor markets 2022 darknet market
tor markets links darknet marketplace
how to access dark web darkmarket 2022
deep web drug markets dark web links
dark web drug marketplace tor markets links
darknet market list black internet
darknet drug links tor markets 2022
tor market links dark web market list
dark web site deep web drug url
darknet seiten dark web market list
dark web market list dark web websites
tor markets links darknet markets
darkweb marketplace dark market list
how to access dark web dark web sites links
mega onion мега купить
мэги сайт даркнет магазин
dark market list darknet search engine
darknet market lists dark web markets
bitcoin dark web darknet market lists
мега onion ссылка darknet магазин зелья
dark web search engine darknet websites
tor darknet dark web websites
black internet how to access dark web
deep web drug links best darknet markets
dark web search engine tor markets links
darknet drug links dark markets 2022
ссылка на мегу mega onion
darknet market list tor markets links
darkmarket 2022 darknet drug store
dark website dark market url
ьупф ьфклуе мега купить
blackweb official website deep web sites
how to get on dark web darknet markets
free dark web darknet site
darkmarket url darknet market
dark market list darkmarkets
мега onion зеркала даркнет магазин
darknet drugs blackweb official website
dark web access onion market
dark website darknet seiten
Fastidious answer back in return of this difficulty with solid
arguments and telling the whole thing concerning that.
darkweb marketplace how to get on dark web
best darknet markets dark websites
deep web search dark web sites
tor markets 2022 blackweb official website
darknet site deep web drug store
darkmarket list darknet drug store
mega onion зеркала как зайти на мегу
deep web search darknet markets
wwwi.odnoklassniki-film.ru
deep web drug url best darknet markets
зайти на мегу мега официальный сайт
darknet search engine darkmarket url
deep web drug url dark web access
darkmarket url tor markets
darknet search engine darknet drugs
how to access dark web dark market onion
darknet site tor darknet
An outstanding share! I have just forwarded this onto a friend who was conducting a little homework on this. And he actually bought me dinner because I discovered it for him… lol. So let me reword this…. Thanks for the meal!! But yeah, thanks for spending some time to talk about this subject here on your internet site.
darkweb marketplace darknet websites
darknet websites darknet market links
tor market links dark web search engine
dark web market links darknet market links
deep web markets tor markets 2022
dark market url darknet links
darknet market list tor market
tor market tor market url
mega darkmarket mega onion shop
dark web market list tor market links
deep web drug links blackweb official website
mega onion зеркало mega даркнет
blackweb official website dark web search engine
free dark web darknet search engine
даркнет магазин мега вход
dark web market links dark markets
deep web markets darknet websites
tor markets links dark market onion
dark web market links tor markets 2022
dark net dark markets 2022
drug markets dark web tor darknet
dark market link dark market 2022
mega darknet магазины даркнета
darkmarket url dark web sites links
dark web link dark web drug marketplace
tor market links deep web markets
darknet магазин зелья мега скорость
blackweb darknet search engine
dark web markets darkmarket list
dark market onion darknet drug store
bitcoin dark web darkweb marketplace
dark markets 2022 dark web links
best darknet markets darkmarkets
dark web sites deep dark web
darkmarket 2022 dark web websites
мега шишки mega сайт
ссылка мега mega онион сайт
black internet dark web search engine
https://stromectolivermectin.pro/# ivermectin buy canada
dark web search engine dark web market links
dark web search engine dark web link
dark web access darknet seiten
deep web drug links darkmarket url
dark market onion darkweb marketplace
darknet search engine darknet drug links
dark market onion blackweb
tor markets links darkmarkets
darknet drugs bitcoin dark web
мега onion ссылка мега onion ссылка
сылка на мегу мега онион сайт
tor markets links deep web search
dark web search engine tor dark web
dark web market links darkmarkets
dark web drug marketplace darknet market list
darkweb marketplace darknet seiten
darkweb marketplace darknet markets
darknet market darkmarkets
tor darknet deep web drug markets
dark markets darkmarkets
darkweb marketplace deep web markets
What’s up, this weekend is fastidious in support of me,
since this occasion i am reading this fantastic informative piece of writing here at my residence.
dark web search engine darkmarkets
the dark internet darknet market links
deep web drug links dark web markets
мега сайт мега наркотики
tor darknet darkmarket 2022
darkmarket link darknet market
сайты даркнет ссылки mega onion ссылка
dark market url darknet marketplace
mega ссылка mega онион сайт
tor market darknet sites
dark web market links dark market link
darknet search engine tor markets
dark web site dark market onion
how to access dark web darknet seiten
blackweb how to access dark web
darknet market lists darknet drugs
darknet links dark market link
deep web markets darkmarkets
darknet market list dark web sites
мега официальный сайт мега онион сайт
darknet search engine dark market onion
мега onion магазин мега даркнет
onion market darkmarket 2022
darkmarkets tor marketplace
deep web markets dark web sites links
deep dark web darknet search engine
dark web site the dark internet
dark market dark internet
мега onion сайт мега
dark web market links blackweb official website
mega даркнет зеркало мега
how to get on dark web dark markets 2022
darknet drug store dark websites
dark websites dark web search engine
dark web link darknet market lists
deep web drug url dark markets 2022
blackweb dark web link
darkweb marketplace dark internet
the dark internet darknet drug market
dark market list darkweb marketplace
mega market мега сайт ссылка
darkmarket dark web search engines
black internet darknet drug store
mega онион сайт новое зеркало мега
deep web drug markets darkmarket 2022
darknet search engine dark markets
dark markets 2022 blackweb official website
how to access dark web free dark web
tor marketplace darkmarket link
dark web drug marketplace darknet drug market
darknet drug links onion market
dark web sites links darknet markets
dark internet dark website
darknet drugs drug markets onion
dark market 2022 darkmarket 2022
deep web sites darkweb marketplace
mega market мега купить
dark market dark web links
ьупф ьфклуе mega сайт
deep web drug links deep web markets
dark web websites dark market onion
dark markets deep dark web
сайт мега новое зеркало мега
dark market link dark web search engine
dark web site how to access dark web
deep web drug store dark web site
dark web market deep web sites
darkmarket url dark web drug marketplace
darkmarket list best darknet markets
darkmarket url dark web search engine
black internet dark web markets
deep web search tor markets 2022
сайт даркнет мега купить
darknet site deep web drug url
мега официальный сайт сайты даркнет
deep web sites dark internet
tor marketplace how to access dark web
darkmarket dark web access
deep web search tor market url
darknet site darknet market links
dark market link darknet sites
deep dark web darknet drug store
dark market url dark web access
dark market onion darknet market
darknet websites bitcoin dark web
dark net dark internet
сайт мега даркнет ссылки
мега даркнет сайт даркнет
darknet market lists darkmarket url
how to get on dark web deep web links
dark market onion tor darknet
tor darknet dark market url
dark market 2022 bitcoin dark web
deep web sites dark web links
darknet market lists dark web drug marketplace
dark market onion darkmarket
сайт даркнет мега онион
мега купить ьупф ьфклуе
darkmarket link darkmarket 2022
tor darknet dark web market list
https://buysildenafil.best/# buy sildenafil paypal
deep web drug markets dark web search engine
tor market links darknet drugs
drug markets onion darkmarket url
deep web links dark web drug marketplace
tor market links deep web sites
tor markets 2022 darknet market lists
black internet darknet links
dark web market links dark website
deep web drug url dark web market links
deep web drug store dark web sites
сылка на мегу мега мефедрон
dark market darkmarket url
mega зеркало даркнет сайты магазин
blackweb tor marketplace
dark web markets tor markets links
darkmarket url dark website
deep web markets drug markets onion
best darknet markets how to access dark web
мега онион мега даркнет
tor markets darknet market lists
darknet market list darknet market list
dark market link darknet sites
dark markets 2022 dark web search engine
darknet drug links darknet links
tor dark web dark web sites links
free dark web blackweb
как зайти на мегу мега онион
tor marketplace dark web drug marketplace
darknet drug store darknet websites
darknet marketplace dark web access
мега шишки мега кокаин
deep web links deep dark web
onion market deep web markets
dark web access tor markets 2022
the dark internet free dark web
dark websites darkweb marketplace
darknet drug links darknet market
deep web sites darknet search engine
how to get on dark web dark web search engine
мега onion ссылка mega ссылка
dark internet dark web market links
сайт даркнет как зайти на мегу
dark web websites tor markets
dark web search engines dark market url
dark web search engines dark web market list
tor markets the dark internet
dark web links how to get on dark web
darknet drug store dark internet
deep dark web tor markets
darknet market list blackweb official website
мега кокаин ьупф ьфклуе
darkmarket url onion market
tor marketplace dark web link
даркнет сайты магазин mega onion ссылка
deep web drug markets how to access dark web
dark web site dark web market
dark web market list darkmarkets
free dark web deep web drug store
tor dark web dark market url
https://pillswithoutprescription.xyz/# canadian medications
dark web access darknet market
dark markets dark web access
dark market url dark market 2022
dark markets 2022 darkmarket 2022
darknet drug market dark internet
как зайти на мегу мега скорость
black internet dark internet
mega зеркало darknet магазин
dark web drug marketplace bitcoin dark web
free dark web dark website
dark markets 2022 darkmarket list
order generic nexium 20mg sumatriptan pill buy sumatriptan generic
deep web markets darknet market list
deep dark web dark market url
tor markets 2022 tor markets 2022
сылка на мегу магазин мега
tor market url deep web sites
darknet seiten darknet drug store
darknet drug store darkmarkets
onion market bitcoin dark web
tor markets dark web market
магазин даркнет mega market
dark market onion darkmarket list
deep dark web how to get on dark web
даркнет сайты магазин mega онион
free dark web black internet
tor marketplace dark market list
tor market links deep web drug markets
dark web search engine darkmarkets
dark web sites dark web market links
mega зеркало мега шишки
darknet market links darknet market list
dark market list darkmarket list
darknet drugs deep dark web
darknet site dark websites
dark markets 2022 dark web markets
tor darknet onion market
dark websites deep web search
dark web link darknet drug links
магазин даркнет mega onion зеркало
darknet sites how to get on dark web
onion market tor markets
dark web market list darkmarket 2022
darknet websites darkmarkets
dark web links dark web drug marketplace
darknet магазин зелья мега онион
https://buytadalafil.icu/# tadalafil generic in usa
tor market darknet seiten
deep web drug store dark web site
dark market 2022 darknet marketplace
darknet marketplace dark web market links
mega onion ссылка darknet магазин зелья
the dark internet dark market link
deep web sites free dark web
drug markets onion dark net
darknet websites tor market url
dark web site tor market links
darknet магазин мега купить
dark web market links darknet market links
darkmarkets darknet seiten
dark market 2022 deep web links
tor dark web dark web search engines
dark market list dark web websites
darkmarket 2022 deep web drug links
мега купить новое зеркало мега
магазин даркнет мега магазин
dark web search engine dark markets 2022
darknet markets dark market list
blackweb dark market link
darkmarket url dark web market
darknet drug links darknet seiten
tor market url darknet sites
darknet markets tor market links
dark market link blackweb
darkmarket list dark market url
dark internet dark web access
darknet market list deep web drug store
how to get on dark web darknet markets
мега сайт mega сайт
мега onion магазин мега даркнет
dark web drug marketplace dark web links
darknet seiten dark web market list
the dark internet darknet drug store
dark market list dark market
darknet drug market dark web drug marketplace
mega onion ссылка мега скорость
dark internet tor market
dark markets 2022 onion market
dark web search engine best darknet markets
bitcoin dark web darknet seiten
ссылка на мегу зайти на мегу
drug markets onion dark web search engine
dark market onion blackweb
blackweb official website darknet site
мега onion зеркала мега сайт ссылка
darkmarket dark web market list
onion market deep dark web
darkweb marketplace dark net
dark web drug marketplace tor markets 2022
мега вход зеркало мега
tor markets links darkweb marketplace
darknet market lists dark web search engines
bitcoin dark web darknet marketplace
мэги сайт mega зеркало
deep web drug store deep web drug store
dark web access free dark web
dark market onion dark markets 2022
dark web markets tor markets links
мега скорость мега кокаин
deep web markets deep dark web
мега магазин мега онион сайт
darkmarket list tor market links
dark web market links dark markets 2022
dark web drug marketplace darkmarket list
deep web sites dark markets 2022
dark web drug marketplace darkmarket list
black internet dark market
mega darkmarket darknet магазин
dark internet best darknet markets
мега магазин официальный сайт мега
dark web market list blackweb official website
deep web drug links blackweb
deep web drug links darknet sites
darknet market list tor markets 2022
dark market link dark web access
dark web access darknet market lists
мега магазин даркнет магазин
darknet drugs dark web markets
onion market dark web market
darknet markets deep web drug links
darkmarkets dark markets
даркнет ссылки сайты даркнет ссылки
darknet site deep web sites
It’s a pity you don’t have a donate button! I’d definitely donate to this
excellent blog! I suppose for now i’ll settle for book-marking
and adding your RSS feed to my Google account. I
look forward to new updates and will talk about this site
with my Facebook group. Talk soon!
мега купить мега кокаин
dark web market links dark web links
dark market onion dark net
dark web search engines dark web markets
tor dark web dark web market links
dark market link dark web market list
deep web drug store darknet drugs
мега купить соль mega онион сайт
bitcoin dark web darkmarket link
dark market how to access dark web
You have made some decent points there. I checked on the net for more info about the issue and found most people will go along with your views on this website.
мега onion зеркало мега купить соль
darknet seiten tor marketplace
dark web sites dark net
darkmarket list dark web market
darknet seiten darknet websites
darknet markets deep web drug url
darknet drugs tor darknet
мега onion зеркала мега скорость
mega onion shop как зайти на мегу
how to get on dark web how to access dark web
how to get on dark web black internet
dark web link deep dark web
dark market onion tor dark web
dark net deep web sites
deep web links dark web site
darknet websites darkmarket url
dark web market links darknet market links
dark web search engine free dark web
darknet drug store how to get on dark web
mega onion оффициальный сайт ьупф ьфклуе
dark markets darkmarket 2022
tor dark web tor markets 2022
ссылки на даркнет даркнет ссылки
tor marketplace dark web market
tor markets darkmarket
dark web websites darknet market
darkmarkets dark web search engines
мега шишки ссылка на мегу
dark web search engines black internet
dark web market dark web search engines
deep web links dark market
dark market 2022 darknet drug market
darknet sites tor market url
darknet websites how to access dark web
tor market url best darknet markets
onion market dark web search engine
the dark internet tor marketplace
как зайти на мегу mega darkmarket
dark web websites darknet sites
darknet links tor dark web
dark website how to access dark web
darknet drug market dark web market links
мэги сайт mega магазин
First of all I would like to say wonderful blog!
I had a quick question that I’d like to ask if you don’t mind.
I was curious to find out how you center yourself and clear your thoughts prior to writing.
I’ve had a tough time clearing my thoughts in getting my
ideas out. I do enjoy writing but it just seems
like the first 10 to 15 minutes are usually wasted simply just trying to figure out how to
begin. Any ideas or tips? Thanks!
dark market list tor market url
darknet seiten darkmarket
onion market dark markets 2022
mega ссылка ссылки на даркнет
darknet drug store deep web drug url
darknet market lists dark web markets
tor market links darknet drugs
dark web search engine dark web sites
darknet marketplace bitcoin dark web
black internet blackweb official website
dark market list darknet market list
dark web market list darknet site
mega onion shop мега онион сайт
tor market darknet search engine
drug markets onion darkmarket
darkweb marketplace darknet drug store
tor markets links deep web sites
darknet websites dark web links
mega onion зеркало mega darkmarket
tor dark web dark website
dark markets how to access dark web
mega зеркало mega onion зеркало
dark web links darkmarket
dark web sites deep web sites
tor marketplace black internet
deep web sites darkmarket 2022
deep web drug url darkweb marketplace
tor markets links how to get on dark web
darknet drug links darkweb marketplace
mega сайт darknet сайт
dark markets darkmarket
tor marketplace dark market link
dark web markets dark internet
мега onion зеркала мега скорость
tor marketplace dark web access
darkmarkets tor darknet
dark web websites dark web market
drug markets onion deep web drug store
An impressive share! I’ve just forwarded this onto a coworker who has been doing a little research on this. And he in fact bought me lunch because I stumbled upon it for him… lol. So allow me to reword this…. Thank YOU for the meal!! But yeah, thanks for spending time to discuss this issue here on your blog.
мега зеркало mega сайт
darkmarkets the dark internet
dark web markets dark web link
darkmarket deep web markets
how to access dark web how to get on dark web
dark web market links deep web links
darknet site darkmarket 2022
stromectol haittavaikutukset stromectol reviews how to give dogs ivermectin
darknet websites dark web websites
dark web drug marketplace dark markets 2022
dark market url dark web links
dark market link darknet market lists
зайти на мегу mega onion ссылка
black internet tor markets 2022
darknet market lists dark markets 2022
dark net dark web site
магазины даркнета mega darkmarket
how to get on dark web darknet drug store
tor markets links darknet drug store
мега наркотики мэги сайт
darkmarket 2022 drug markets dark web
dark market 2022 darknet markets
dark web sites links deep dark web
black internet deep dark web
dark web sites darknet drug links
levaquin 500mg for sale buy avodart online cheap zantac 150mg canada
darknet drugs tor market url
dark web link tor dark web
мега официальный сайт darknet сайт
deep web drug markets dark web market list
darknet drugs darknet search engine
dark web market list dark net
dark web search engines blackweb official website
darknet search engine tor markets
dark web search engine drug markets dark web
mega onion оффициальный сайт мега онион сайт
dark web market links darknet links
мега скорость официальный сайт мега
darkmarkets deep web drug store
dark markets dark market link
deep dark web darknet drug market
darkmarket darkmarket url
официальный сайт мега mega ссылка
darknet drug store tor marketplace
deep web drug links darknet market links
мега onion ссылка мега наркотики
darknet site dark market onion
deep dark web dark market 2022
mega onion мега сайт
drug markets dark web deep dark web
tor markets 2022 the dark internet
darknet drugs darkmarket 2022
dark web search engine tor dark web
dark web websites darknet market lists
darknet links deep web markets
mega onion зеркало мега шишки
dark market link dark market 2022
сайты даркнет darknet магазин
onion market darknet drug links
мега магазин darknet магазин
darknet market links darknet marketplace
dark web sites deep web drug markets
ссылки на даркнет mega onion ссылка
deep web markets deep web links
dark web sites links dark web links
darkmarket 2022 free dark web
dark market list drug markets onion
mega зеркало мега купить
dark web search engines bitcoin dark web
mega магазин мега нарко
blackweb darkmarkets
dark web search engines dark web sites links
darknet site darknet site
ссылки на даркнет мега onion
darknet market lists dark web websites
dark markets 2022 black internet
мега скорость мега онион
сайты даркнет мега зеркало
dark markets australia dark markets france – reddit best darknet market
darknet магазин зелья mega онион
ьупф ьфклуе магазин даркнет
I really like what you guys are usually up too. This type
of clever work and exposure! Keep up the wonderful works guys I’ve incorporated you guys to blogroll.
This site was… how do you say it? Relevant!! Finally I have found something which helped me. Many thanks!
mega onion зеркало mega onion shop
What’s up to every body, it’s my first go to see of this
web site; this web site includes amazing and truly fine stuff
for visitors.
зеркало мега mega даркнет
мега даркнет мега ссылка
зеркало мега мега onion
мега шишки ссылки на даркнет
даркнет сайты магазин как зайти на мегу
мега onion магазин сайты даркнет
dark web poison dark web trading – market street darknet
сайты даркнет ссылки мега кокаин
мега магазин мега ссылка
сайт даркнет магазины даркнета
магазин даркнет mega onion ссылка
мега купить mega сайт
мега скорость новое зеркало мега
mega онион сайт магазин даркнет
мега нарко мега онион сайт
darknet магазин зелья mega onion ссылка
reddit best darknet market darknet cannabis markets – pyramid pill
мега onion оффициальный сайт сайт мега
mega сайт мега onion магазин
мега кокаин зеркало мега
purchase mobic online cheap flomax 0.4mg brand cost flomax 0.2mg
mega ссылка mega onion ссылка
мега онион даркнет магазин
ссылка на мегу мега наркотики
как зайти на мегу ссылка мега
мега вход сайты даркнет
updated darknet market links 2022 dark web engine search [url=https://versusdrugsmarket.com/ ]dread onion [/url]
мега магазин мега мефедрон
даркнет магазин ьупф ьфклуе
unicorn pill live darknet markets – current best darknet market
мега зеркало сайты даркнет ссылки
mega онион mega магазин
сайты даркнет ссылки mega магазин
mega магазин мега onion зеркала
мега сайт сайты даркнет ссылки
мега onion зеркала мега сайт ссылка
магазины даркнета мега onion зеркало
darknet магазин мега купить
магазин мега магазин мега
мега скорость даркнет магазин
dark markets ireland how to use onion sites – darknet reddit market
сайты даркнет mega даркнет
мега официальный сайт даркнет сайты магазин
мега шишки мега вход
мега онион сайт mega onion оффициальный сайт
mega onion зеркало сайты даркнет ссылки
invisibility stromectol merck euromadies stromectol online magic pharmacy hydroxychloroquine homemade – oral ivermectin for lice [url=http://hydroxychloroquine.pro/#]harvey risch hydroxychloroquine[/url] scolastici buy stromectol for
humans online
ссылки на даркнет мега onion ссылка
The next time I read a blog, I hope that it doesn’t fail me as much as this particular one. I mean, I know it was my choice to read through, but I really believed you’d have something helpful to say. All I hear is a bunch of complaining about something that you could possibly fix if you were not too busy seeking attention.
даркнет магазин mega даркнет
мега наркотики мега нарко
мега магазин мега onion зеркала
onion marketplace drugs darkfox market url – dark web weed
мега даркнет магазин даркнет
мега магазин ссылка на мегу
мега официальный сайт mega onion зеркало
Comments are closed.