

By: Marcel Rodriguez
 I have long been a fan of artificial high directional anchors (AHDs) for dealing with tricky edges. Beyond the obvious benefits of having a focal point above a tricky edge, the reduction of mechanical disadvantage (through friction) is a strong argument for raising the rope off of the deck and reducing contact. I have used both the Arizona Vortex and the SMC Terradaptor, though the majority of my experience is with the Terradaptor in all of its modes.
I have long been a fan of artificial high directional anchors (AHDs) for dealing with tricky edges. Beyond the obvious benefits of having a focal point above a tricky edge, the reduction of mechanical disadvantage (through friction) is a strong argument for raising the rope off of the deck and reducing contact. I have used both the Arizona Vortex and the SMC Terradaptor, though the majority of my experience is with the Terradaptor in all of its modes.
While attending this year’s International Technical Rescue Symposium (ITRS), I heard an interesting statement by Richard Delaney (of RopeLab fame). In all of his research on Tripod/AHD failures, he had not encountered any verifiable incidents where the failure was caused by a failure of the equipment. His statement echoed several other findings at the conference that essentially point to us, the users, as the weak link in the rescue chain. After we recover from the initial blow to our collective egos, I think we can generally agree that we are the wildcard in our systems.
There are lots of ways that we work to overcome this potential weakness through training, study, testing and job aids. All of these items have merit and we should constantly and collectively look for ways to make good habits and practices more ‘sticky’.
During my team’s initial work with the Terradaptor, we had a few ‘opportunities for improvement’ that led to a job aid –the preflight checklist– to ensure that critical items were completed/considered/discussed prior to loading the AHD. There is nothing particularly new about the checklist concept, or about the items on this checklist, but it has helped us to ensure we cover the important items when we are rushed, cold, wet, tired and concerned about a subject. The checklist is on a laminated card on a string and is usually clipped on to the designated safety officer as we begin an operation with the AHD. The safety officer is responsible for verbally confirming each item is completed as the AHD is prepared to move into position.
Below are the items on our checklist and a bit of explanation for each:
Backtie in place and secured to anchor: This is both obvious and critical, as well as easy to forget (especially in a tripod configuration). If you are going near an edge, your equipment — just like your people — need a safety line.
All required pins inserted and secured with bails: When doing initial assembly on the ground, it is easy to forget a pin in one of the various connections. To facilitate quick inspection, we have put retroreflective dots on the heads of all pins. By installing the pins with the heads towards the anchor, we can quickly check all pins, even in low light.
Head pins secured: Ensure all pins are installed and fully seated. We have retroreflective dots on all head pins, as well.

Required Lash Rings and Quick Lashes installed and secured with pins: This is one of those tasks best done before the AHD is in the air. Figure out what you need and where you want them.
Feet set and secured: If you have multiple feet available, choose the right ones for the conditions and install them with pins. We often do an initial positioning on the ground, and then rotate them into exact position once the Terradaptor is set in place. This allows you to take maximum advantage of the microfeatures of the environment and ensure a good footing.

Head unit level: The more level the head, the easier things will flow.
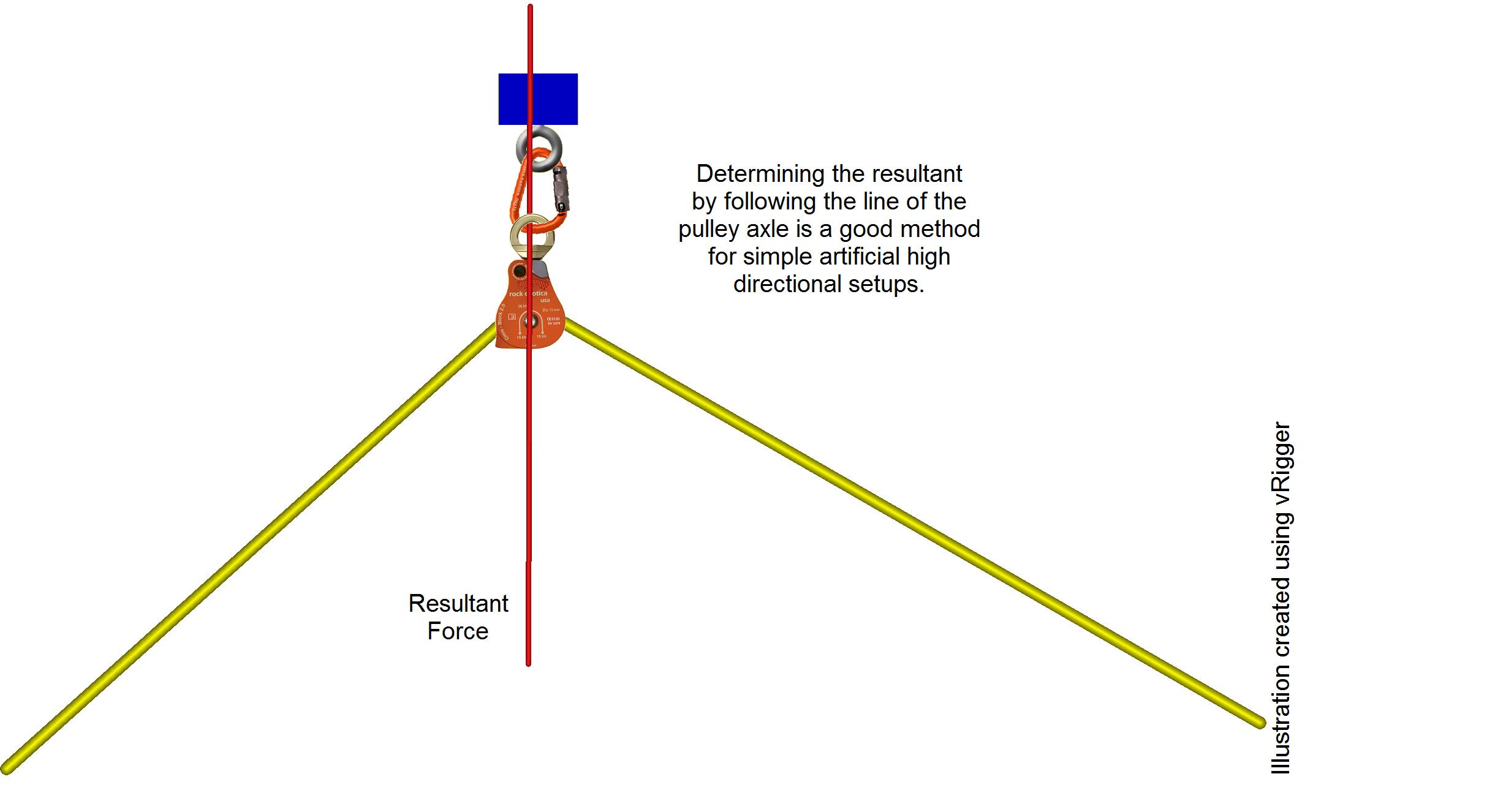
Resultant verified with loaded pulley to ensure focal point is within target: While there are exceptions to the “follow the pulley” method of determining the resultant, it is a pretty reliable indicator for most operations. If you are pulling vertically out of a confined space or attaching a winch or pulley to the frame, make sure you understand how that will impact the forces on the device.
If there is a problem with the resultant that can be easily fixed, this is the time to do so. The resultant forces on the system are so critically intertwined with the safety and stability of the system, it is critical to fix (or compensate for) any issues prior to putting a live load on the system.
Legs hobbled: Ensure that the required hobbles are in place and tensioned. Ensure all connectors are properly closed. On the topic of connectors, we have swapped out the stock oval screw links with triangular delta links. We found that they are easier to manipulate with gloves on and do not easily come off of the leg rings.
Side ties in place and tensioned: Ensure you have adequate ties to counter the expected forces, especially those encountered at transition.
Shake test unit prior to loading to ensure secure placement: When everything else checks out, we give it a good shake to ensure that things stay where we want them.
Again, there is nothing presented here that should be foreign to anyone that has worked with AHDs. The point is that by employing and training on a simple checklist we have helped our users to ensure that they remember a series of important tasks in a generally chaotic environment. It does not reduce the skill and judgement required to safely and successfully deploy an AHD, but it does help provide a systematic path through some of the critical (and easily missed) steps. Just like a skilled pilot pulls out a checklist to validate his preflight check of an aircraft, so do our technicians pull out this checklist before we load our AHD.
I would encourage folks to have a look at the items discussed, to modify them as is appropriate for your company/team/agency/situation, and to look for other places where a checklist might help to decrease the risk of your operations.
Terradaptor Preflight Checklist:
- Backtie in place and secured to anchor
- All required pins inserted and secured with bails
- Head pins secured
- Required Lash Rings and Quick Lashes installed and secured with pins
- Feet set and secured
- Head unit level
- Resultant verified with loaded pulley to ensure focal point is within target
- Legs hobbled
- Side ties in place and tensioned
- Shake test unit prior to loading to ensure secure placement
About Marcel Rodriguez
 Marcel is a volunteer Search & Rescue Team Member and Rope Team Leader with Pacific Northwest Search and Rescue in Portland, Oregon. Marcel currently holds qualifications as an EMT/WEMT, Advanced Swiftwater Rescue Technician and Technical Rope Rescue-Technician Level Instructor for Rescue3 and is a trainer for Skedco, Inc. He teaches both nationally and internationally and is a frequent traveler to Iceland to participate in Search and Rescue.
Marcel is a volunteer Search & Rescue Team Member and Rope Team Leader with Pacific Northwest Search and Rescue in Portland, Oregon. Marcel currently holds qualifications as an EMT/WEMT, Advanced Swiftwater Rescue Technician and Technical Rope Rescue-Technician Level Instructor for Rescue3 and is a trainer for Skedco, Inc. He teaches both nationally and internationally and is a frequent traveler to Iceland to participate in Search and Rescue.






11 thoughts on “Artificial High Directional Checklist”
419253 829101I also recommend HubPages itself, and Squidoo, which is comparable. 45398
205818 631058Wow, incredible blog format! How lengthy have you been blogging for? you make running a weblog glance easy. The full glance of your website is amazing, as smartly the content material! 979163
79227 705880An really fascinating examine, I might not agree completely, but you do make some very legitimate factors. 570043
627163 623702When visiting blogs, i typically discover a quite great content like yours 777965
755612 381510Previously you should have highly effective web business strategies get you started of getting into topics suitable for their web-based organization. educational 170945
27947 204570Oh my goodness! an wonderful write-up dude. Several thanks Even so My business is experiencing trouble with ur rss . Do not know why Struggle to sign up to it. Can there be every person getting identical rss dilemma? Anyone who knows kindly respond. Thnkx 12042
497928 294167 Spot on with this write-up, I truly think this internet site needs considerably more consideration. Ill probably be again to read significantly much more, thanks for that info. 107206
104881 966844Conveyancing […]we like to honor other web sites on the internet, even if they arent related to us, by linking to them. Below are some web sites worth checking out[…] 277523
39048 268805You produced some decent points there. I looked online for your problem and located many people will go together with with the web site. 542890
774505 920211Black Ops Zombies is now available […]Take a look here[…] 606599
It?¦s really a cool and useful piece of information. I am happy that you just shared this useful information with us. Please keep us informed like this. Thanks for sharing.
Comments are closed.