
Anchoring Focus Floating Guying Concepts: Key Principles for Technical Rescue
Anchoring is the foundation of every technical rescue system. A well-designed anchor system ensures stability, safety, and adaptability in dynamic environments. Whether establishing single-point anchors for simplicity or multi-point systems for load distribution, understanding the core principles of anchoring is critical for successful operations. Additionally, innovative concepts like floating guying systems add versatility when natural anchor points are scarce or inaccessible.
This guide explores the critical elements of anchoring, covering key concepts like anchor selection, angles, load distribution, and releasable systems. It also highlights practical techniques to maximize efficiency while maintaining operational effectiveness.
Anchor Points: Selection and Strength
The strength and suitability of an anchor point dictate the safety of the entire rigging system. Anchor selection must consider the load-bearing capacity, accessibility, and environmental factors. Robust anchors—like trees, rock outcrops, or artificial anchors—provide the stability needed for demanding operations. Additionally, maintaining a safe force angle and ensuring redundancy through back-up anchors are critical steps in anchor selection.
For a detailed guide on evaluating and selecting anchor points, refer to Rigging Lab Academy: Selecting an Anchor.
Understanding Single-Point and Multi-Point Anchors
Single-point anchors are straightforward to set up and rely on one strong attachment point. While quick and efficient, they require absolute confidence in the anchor’s strength. In contrast, multi-point anchors distribute the load across several points, adding redundancy and minimizing stress on individual components. Multi-point setups often incorporate load-sharing systems to balance forces dynamically, improving stability and reliability.
Dive deeper into multi-point systems with Rigging Lab Academy: Mastering Guide Anchors.
Load Sharing and Releasable Anchors
Load-sharing systems distribute forces across multiple anchor points, adapting to shifting loads during dynamic operations. These setups enhance safety by preventing overload on any one component. Meanwhile, releasable anchors offer flexibility by enabling controlled tension adjustments during a rescue. This feature is especially useful for lowering systems or scenarios requiring gradual tensioning.
Explore practical examples of load-sharing and releasable anchors at Rigging Lab Academy: Comprehensive Guide to Anchor Systems.


Angles, Vectors, and Common Pitfalls
The angles between anchor points and the direction of applied forces are critical in maintaining system integrity. Improper angles can exponentially increase stress on anchor points, potentially leading to failure. Optimal angle management ensures that forces remain within safe limits while maximizing system efficiency. Avoid relying on compromised anchor points or configurations that create unmanageable stress.
For an in-depth exploration of force dynamics and their impact on anchors, check out Rigging Lab Academy: Force Management in Rescue.
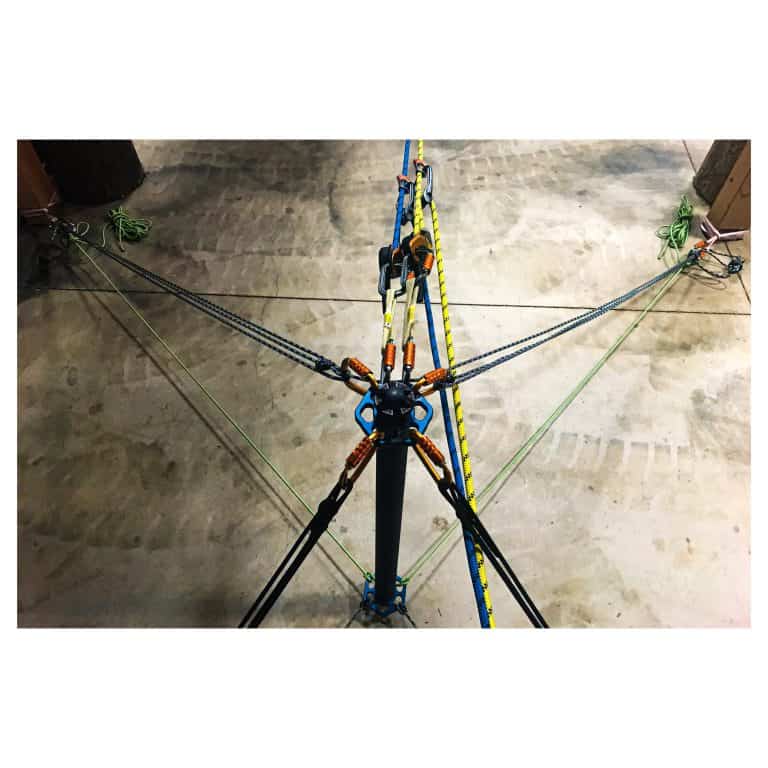
Floating Guying Systems: A Versatile Solution
Floating guying systems offer an innovative approach to anchoring in environments with limited natural anchor points. These systems combine multiple weaker anchor points to create a single, stronger anchor. By reinforcing weak points and distributing forces, floating anchors provide stability in situations where traditional anchors are impractical.
For example, a monopod setup often requires precise guying to ensure balance and safety. Tri-guy or quad-guy configurations distribute forces evenly and prevent tipping. Proper tensioning of guy lines is critical for maintaining the anchor’s integrity during operation.
Learn more about innovative floating systems and guying techniques with Rigging Lab Academy: Artificial High Directional Guide.
Efficiency and Effectiveness in Anchoring
Balancing efficiency and effectiveness is key to building a reliable anchor system. An efficient setup minimizes time and effort, while an effective system ensures stability and safety. Incorporating these principles into training and field operations enables teams to respond quickly and confidently in high-stakes scenarios.
Conclusion
Anchoring systems are the backbone of technical rescue, requiring a deep understanding of load dynamics, anchor selection, and innovative setups like floating guying. By mastering these principles and utilizing resources from Rigging Lab Academy, rescue teams can ensure safety, stability, and adaptability in any situation. Explore RLA’s extensive library to continue advancing your rigging and rescue expertise.
Peace on you Days
Lance






Comments are closed.