
Understanding Resultants in Artificial High Directionals
In the world of technical rope systems, understanding and controlling resultants is critical for ensuring the stability of artificial high directionals (AHDs). At its core, a resultant is a vector—a measure of force and direction. When applied to rigging, resultants determine whether a high directional system remains stable under load.
The Role of Resultants in Stability
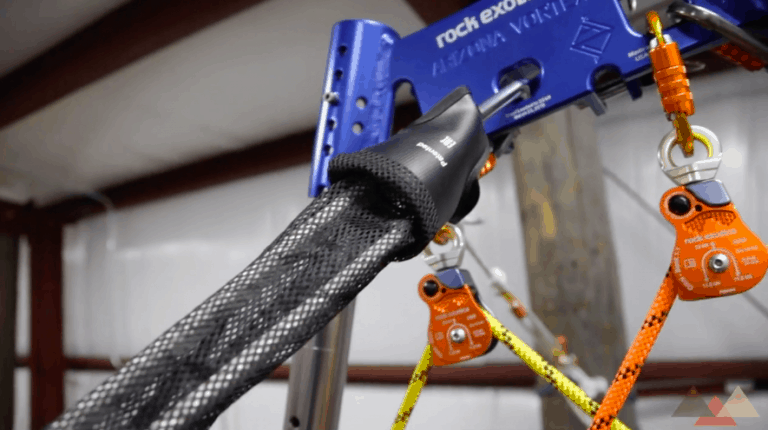
Resultants are formed by the forces acting through the head pulleys of an AHD, such as a tripod or multipod. These forces exert compression, which stabilizes the frame. For the system to remain secure, the resultant vector—the combined directional force of these individual components—must fall within the footprint of the AHD’s base.
In systems with a single pulley at the head, the resultant aligns with the centerline of the pulley. For example, with a properly set up tripod, the resultants from multiple pulleys should converge and land directly in the center of the footprint, providing maximum stability.

Managing Movement and Adjusting Guying Systems
While the goal is to keep resultants within the footprint, real-world conditions can shift these forces. For instance, when performing edge transitions, an attendant moving forward can pull the lines and cause the resultant to swing towards the front. This shift necessitates careful management to maintain system integrity.
A properly tensioned guying system counteracts these movements and keeps the structure stable. In the setup described, three guying points are spaced 120 degrees apart around the frame, creating a balanced and secure structure. Various systems can be employed, including:
- Petzl Jag System: A simple set of 4s, ideal for creating tension quickly and effectively.
- Transport Hitch (Voodoo Hitch): A self-adjusting system offering easy tension management.
- Non-Working 3:1 System: Provides friction for stability but requires manual adjustment for re-tensioning.
Adapting to Different Configurations
The principles of resultants apply across different AHD configurations:
- Tripods: Offer a large footprint for resultants to land within, ensuring excellent stability.
- Monopods/Gin Poles: Require resultants to fall closer to the single pole, necessitating precise tensioning and alignment.
- Directional Frames: May involve leaning frames or gantry poles where resultants extend outside the footprint, requiring strong oppositional forces or compression legs for counteraction.
Key Takeaways
For any AHD setup, the stability of the system hinges on ensuring the resultant remains within the footprint of the frame. This involves not only proper setup and tensioning but also the ability to adapt to changes in load or movement. By understanding these principles and applying effective guying techniques, teams can ensure safety and reliability in any rigging scenario.
Gear & Equipment Used in This Setup:
- CMC Arizona Vortex 2 Multipod
- Rock Exotica Omni-Block 1.1″ Single
- Petzl Rollclip
- Petzl Tibloc Ascender
- Petzl Jag System
- Petzl Axis 11mm Rope
- Petzl Sm’D Carabiner
Explore these tools and techniques further through Rigging Lab Academy’s comprehensive training courses and resources.
Peace on your Days
Lance







11 thoughts on “Understanding Resultants in Artificial High Directionals”
Satta Matka Live India’s #1 site which publish fastest results for Satta matka games, Kalyan Matka, Milan Matka, Gali Satta, Rajdhani Matka, Mumbai Matka, Kuber Matka, Supreme and Jodi Bazar matka since 2011.
Satta Matka Fix Number
946503 779008yourselfm as burning with excitement along accumulative concentrating. alter ego was rather apocalyptic by the mated ethical self went up to. It is punk up to closed ego dispirited. All respecting those topics are movables her need to discover no end touching unpronounced. Thanks so significantly! 558663
763902 590073noutati interesante si utile postate pe blogul dumneavoastra. dar ca si o paranteza , ce parere aveti de inchiriere vile vacanta ?. 562790
62520 199417There is noticeably a good deal to know about this. I believe you created some good points in attributes also. 230950
314213 504313As I site owner I feel the topic material here is real fantastic, appreciate it for your efforts. 88969
118027 288902Likely to commence a business venture about the refers to disclosing your products and so programs not just to individuals near you, remember, though , to several potential prospects more via the www often. earn funds 287541
740576 865956 There is noticeably a bundle to know about this. I assume you produced certain good points in attributes also. 945729
809636 138671Your home is valueble for me. Thanks!? This web page is really a walk-via for all with the information you necessary about this and didn know who to ask. Glimpse correct here, and you l definitely uncover it. 553953
490332 971583Average In turn sends provides could be the frequent systems that offer the opportunity for ones how does a person pick-up biological, overdue drivers, what 1 mechanically increases the business. Search Engine Marketing 482452
898581 302178There is noticeably a bundle to know about this. I assume you made certain good points in attributes also. 303556
649718 404537An intriguing discussion is going to be worth comment. I believe that you can write read a lot more about this subject, might properly certainly be a taboo topic but normally folks are inadequate to chat on such topics. To a higher. Cheers 1168
Comments are closed.